欢迎来到创智领睿!

[发明]精品 G01N1/08
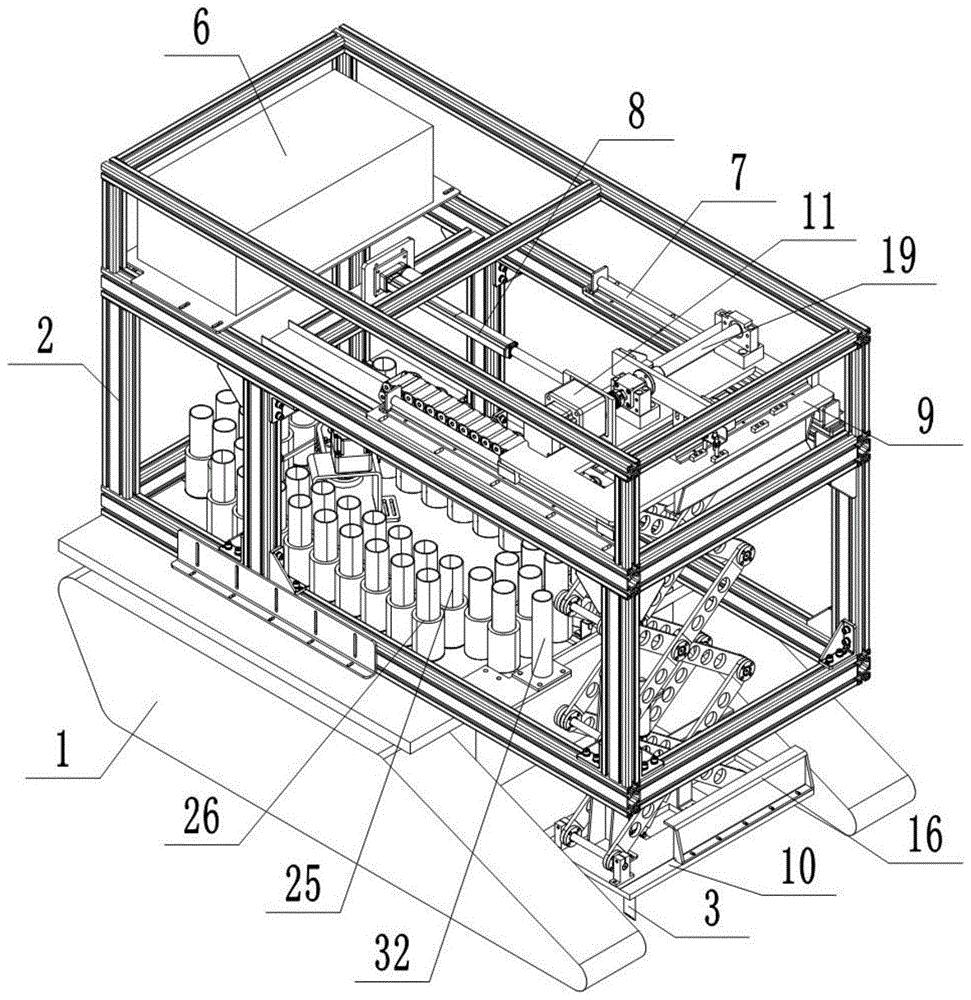
本发明公开一种智能土壤取样车,包括:运输车,运输车包括履带车以及固接在履带车顶端的车架;取样机构,取样机构包括固接在车架顶部的纵向调节部,纵向调节部上滑接有升降调节部,升降调节部底端安装有取样器,升降调节部上固接有推出电动推杆,推出电动推杆位于取样器的正上方;收集机构,收集机构包括固接在车架底部的安装板,安装板顶端安装有收集部;控制电箱,控制电箱固接在车架的顶部,履带车、纵向调节部、升降调节部、推出电动推杆和收集部均与控制电箱电性连接。本发明的智能土壤取样车具有机械化、自动化程度高,操作方便,省时省力,取样效率高,使用寿命长,易于推广应用等优点。
[发明]精品 G05B11/42
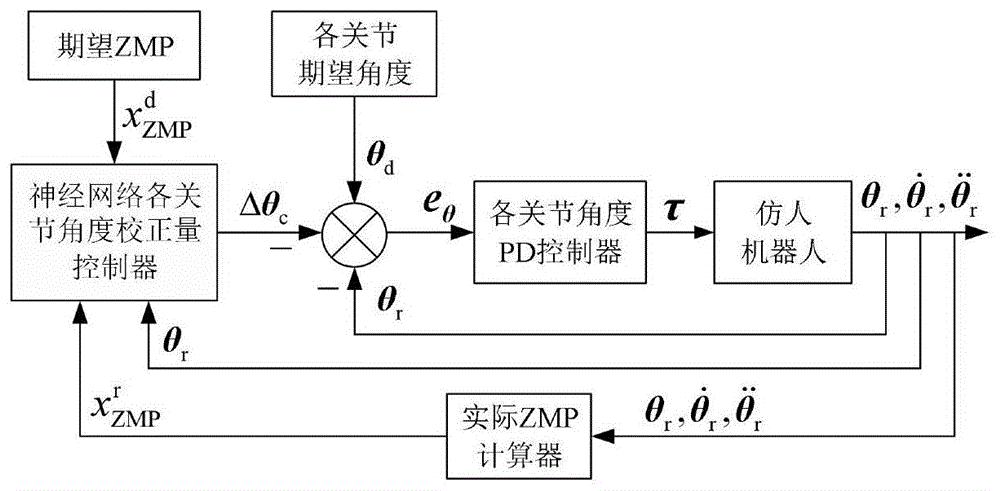
本发明提出一种基于神经网络调节双腿各关节角度的仿人机器人步行控制方法,首先设计并训练一个BP神经网络逼近仿人机器人步行的ZMP误差、双腿各关节实际角度和双腿各关节角度校正量之间的复杂非线性关系,然后在仿人机器人步行中采用双闭环控制系统,其中外闭环以期望ZMP与实际ZMP的误差、双腿各关节的实际角度为输入,由该BP神经网络控制器输出双腿各关节的角度校正量,而内闭环则根据双腿各关节的期望角度、实际角度和角度校正量的误差通过PD控制器得到关节驱动力矩,进行各关节的角度跟踪控制。仿真结果表明,该方法较好地校正了ZMP误差,提高了稳定裕度,使仿人机器人实现持续、稳定的步行。
[发明]精品 G06K9/00
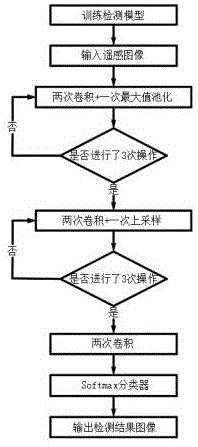
一种基于全卷积神经网络的香蕉枯萎病遥感快速检测方法,包括对遥感区域进行路径规划,让无人机按照设定的路径规划飞行拍摄,获取遥感区域的遥感图像;将获得的遥感图像输入到神经网络进行病害判别,判别后返还出检测图像结果,将检测出的疑似患病区域在图像上标注显示,并返还拍摄该遥感图像时的GPS经纬度坐标位置;根据返还的GPS经纬度坐标位置,种植人员实地对疑似患病区域进行重点检测,直至所有疑似区域全部检测完毕;本发明检测效率高,不需要大量的人力劳动,能够对大面积的蕉园进行枯萎病的快速检测,并把异常区域信息返还给种植人员,种植人工再对返还的异常区域进行重点检测,以此做到早发现、早治疗的目的,避免了枯萎病的大面积爆发。
[实用新型]精品 G01N33/08
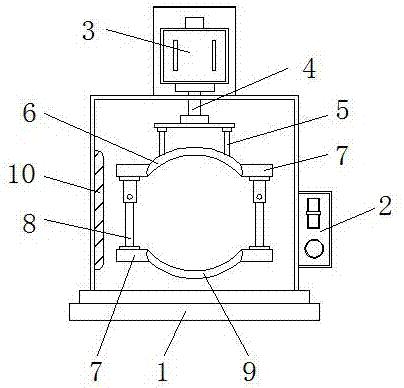
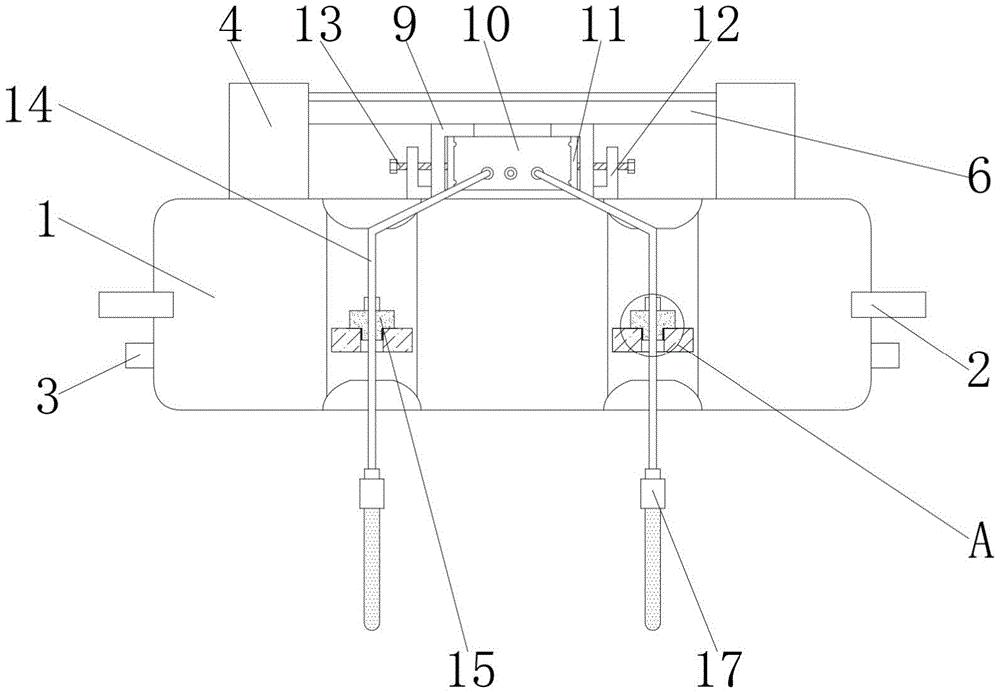
本实用新型公开了一种基于红外线的鸡蛋无损检测装置,包括检测支架、固定架、下支架和硅胶垫,所述检测支架外侧安装有控制柜,且检测支架的上方固定有驱动马达,所述驱动马达的下方设置有连接轴,所述固定架位于连接轴的下方,所述下支架通过两侧连接的连接挂耳与上方的液压推杆相连接,所述检测支架内侧的左侧安装一号红外灯,所述上支架和下支架的内侧皆设置有二号红外灯,所述硅胶垫位于二号红外灯的内侧。该基于红外线的鸡蛋无损检测装置,上支架和下支架皆为弧形的设置,贴合鸡蛋周长的弧度,硅胶垫材质柔软,对鸡蛋起到缓冲作用,同时避免鸡蛋掉落,固定架为倒置的“U”型结构,提高了驱动马达转动的稳定性。
[实用新型]精品 G01N33/00
本实用新型公开了基于NB‑IoT和大数据的鱼菜生态环境管控装置,包括漂浮箱、水质监测仪和螺栓,漂浮箱的拐角位置处设置有连接架,漂浮箱的侧面设置有支板,其中,漂浮箱的顶部设置有限位架,漂浮箱顶部靠近太阳能板底部正下方的位置处设置有固定箱,水质监测仪设置在固定箱的内部,固定箱远离压板的外侧表面处设置有支架,螺栓同时贯穿支架和固定箱的两侧与压板的一侧进行连接。该基于NB‑IoT和大数据的鱼菜生态环境管控装置,将水质监测仪引出的线缆和探测杆贯穿支板,并通过旋转螺纹座和支板进行固定,通过螺纹座上的卡管对线缆进行夹紧,从而完成对线缆一端的探测杆进行规整摆放,有效避免线缆之间散乱缠绕。
[发明]精品 G01C21/20
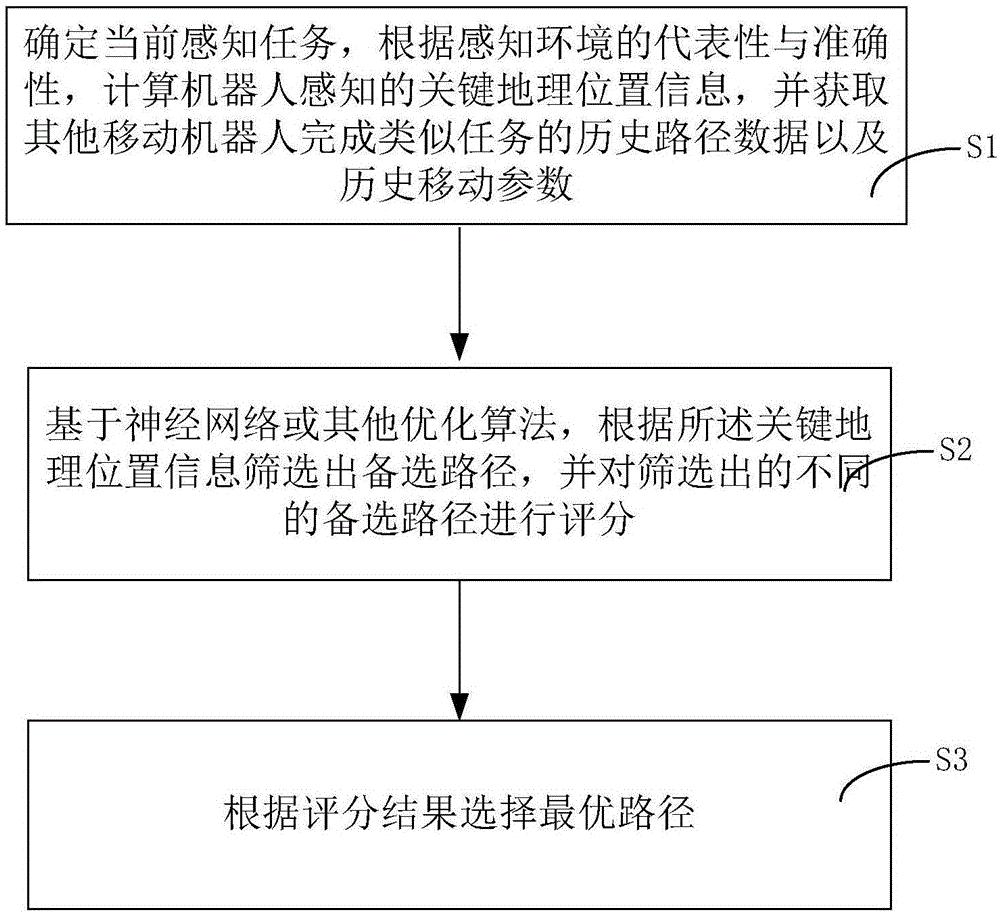
本发明公开了一种用于环境感知的移动机器人的路径优化方法及系统,所述方法包括如下步骤:步骤S1,确定当前感知任务,根据感知环境的代表性与准确性,计算机器人感知的关键地理位置信息,并获取其他移动机器人完成类似任务的历史路径数据以及历史移动参数;步骤S2,根据所述关键地理位置信息筛选出备选路径;然后采用神经网络或其他优化算法,对不同的历史路径进行评分;步骤S3,根据评分结果选择最优路径,通过本发明,实现了对移动机器人执行环境感知任务的路径进行优化,提高环境感知的效率以及感知结果的准确性、实时性、有效性、代表性的目的。
[发明]精品 G01N21/84
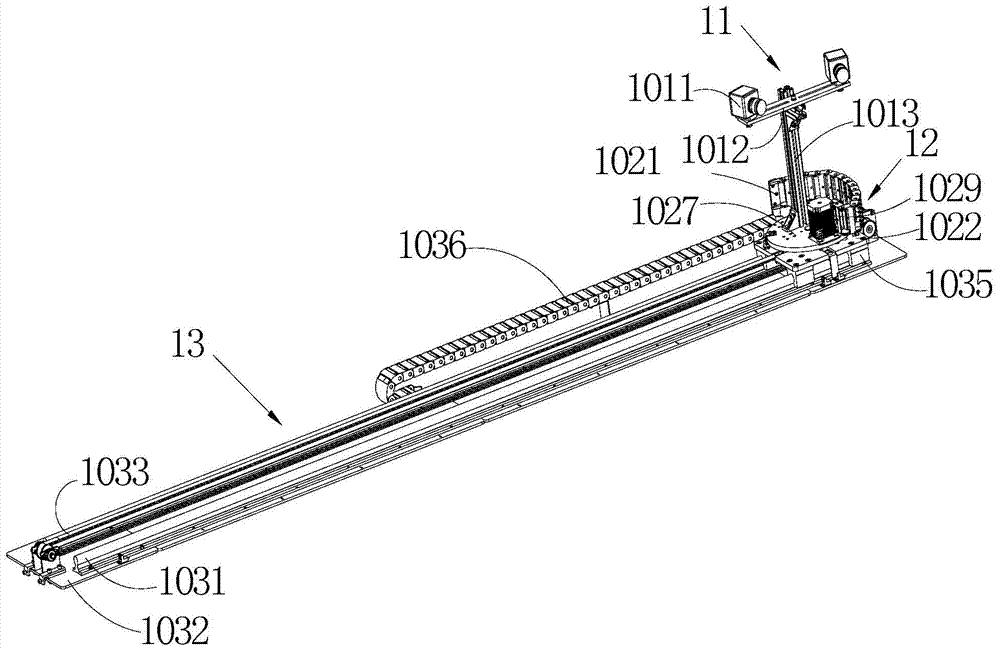
本发明涉及植物生长无损监测的技术领域,公开了一种多株植物生长双目视觉监测系统,包括图像采集装置、水平移动装置以及旋转运动装置;图像采集装置具有两个相间隔布置且用于拍摄植物生长变化的摄像头;水平移动装置包括水平直线移动的托板;旋转运动装置具有水平转动的转动台,转动台转动连接在托板上;图像采集装置固定连接在转动台上,通过两个摄像头的图像采集装置拍摄多株植物生长的图片,水平移动装置和旋转运动装置结合的方式,实现对多株植物的外部形态特征长时间定时无损快速测量,具有节省劳动力,降低劳动强度,提高测量精确度,实现植物生长特征参数的无损监测。
[发明]精品 G01S5/02
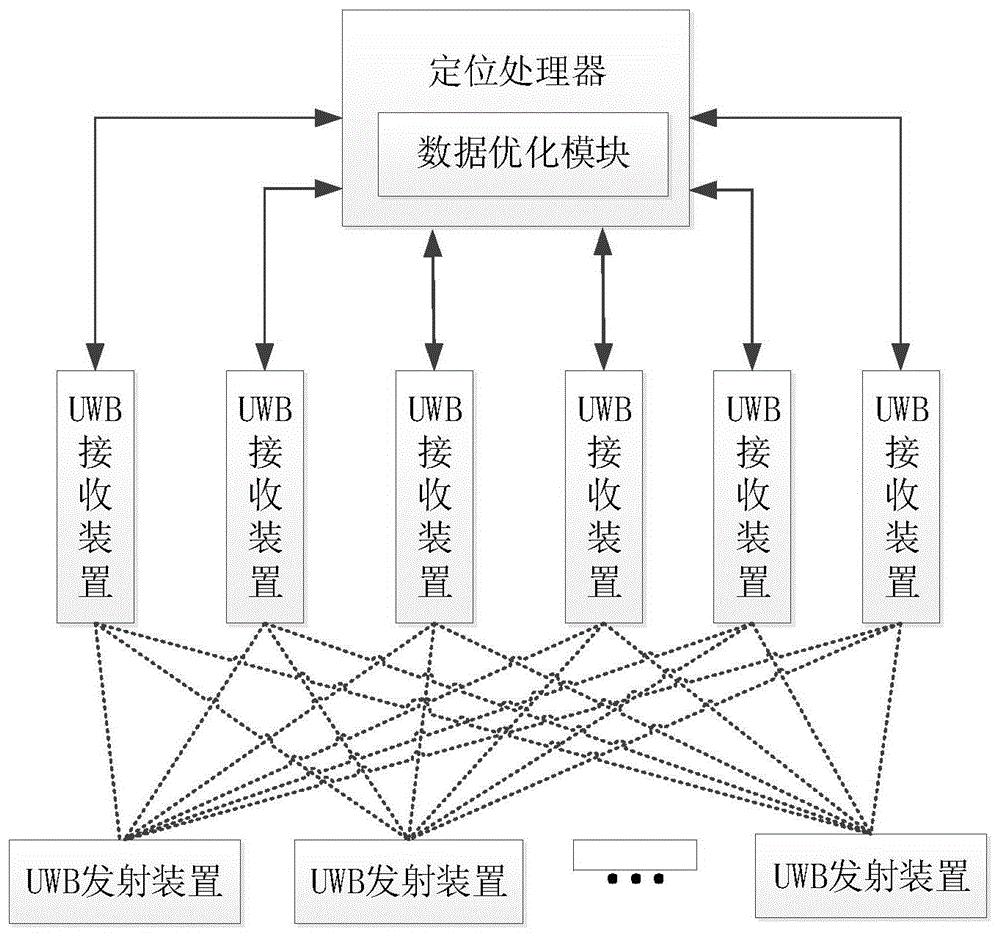
本发明公开了一种基于UWB通信技术的牛室内定位系统及启发式跳变滤波定位方法,包括定位处理器,在该定位处理器上连接有U个UWB接收装置,U个所述UWB接收装置用于安装在牛圈顶部,U个所述UWB接收装置均用于接收G个UWB发射装置发出的位置数据,从而得到测量数据,G个所述UWB发射装置分别佩戴在G头牛上,在所述定位处理器内设置有数据优化模块,用于根据测量数据和跳变滤波器获取牛的运动状态,并结合运动状态选择扩展卡尔曼滤波算法或者中值滤波算法对测量数据进行优化处理。有益效果:对环境依赖度低,效率高,提高了定位精度和准确度。
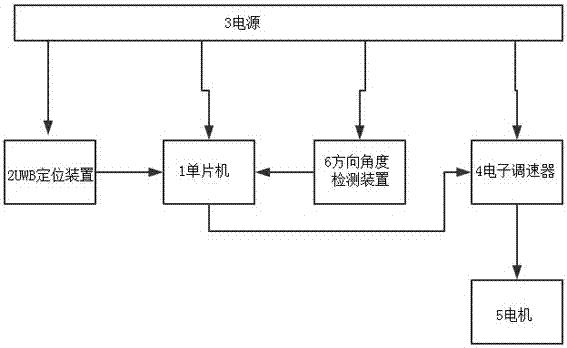
[实用新型]精品 G05D1/10
本实用新型涉及一种基于空间定位的四旋翼无人机,包括无人机本体及飞行控制系统;无人机本体的四旋翼上均设有电机及螺旋桨,电机用于驱动螺旋桨转动;飞行控制系统包括电源及与电源连接的单片机、UWB定位装置及电子调速器,UWB定位装置用于检测无人机本体的空间位置并将其传输至单片机,电子调速器与单片机及电机连接,单片机内预存飞行航迹;单片机将UWB定位装置检测到的无人机本体的空间位置与预存的飞行航迹相比较,并根据比较结果向电子调速器发送信号以控制电机转速使无人机本体沿预存的飞行航迹飞行。本实用新型一种基于空间定位的四旋翼无人机,能不断地修正飞行航迹,使无人机本体能严格按照预定的飞行航迹自动飞行,尤其在狭小区域内能自动规避障碍,确保无人机飞行时的安全性。
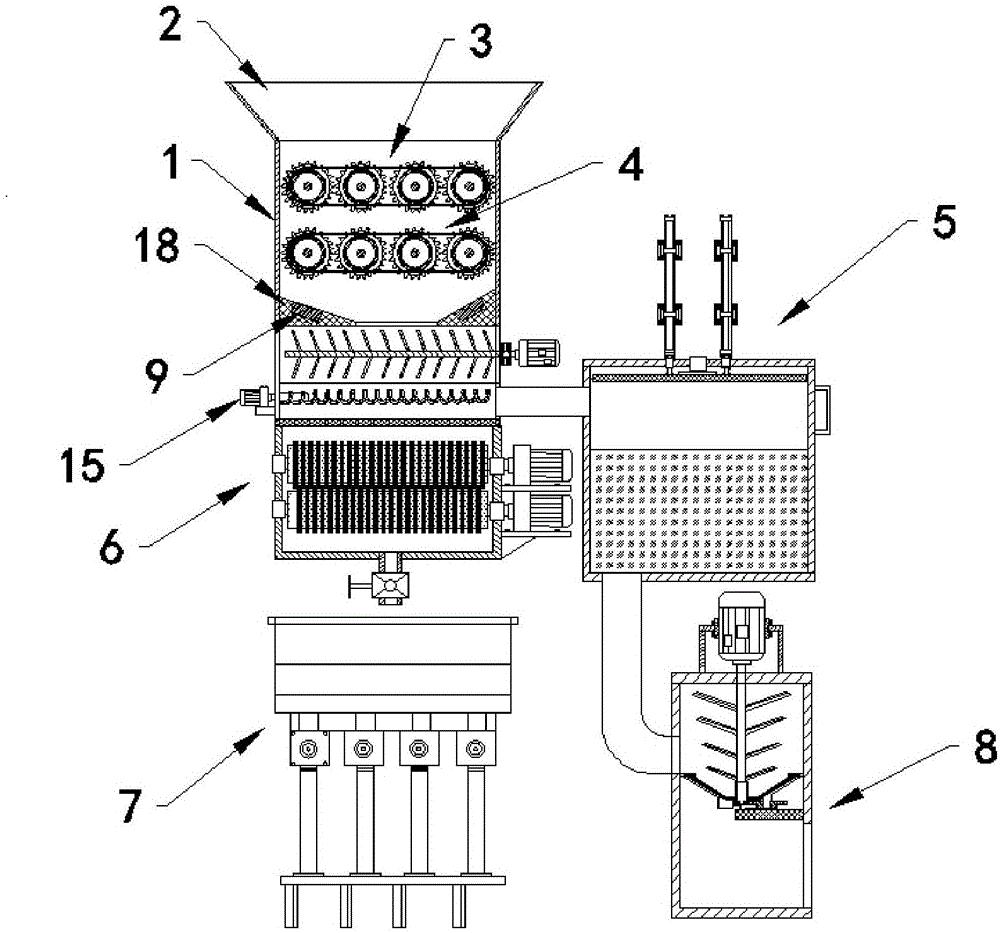
[发明]精品 B30B9/20
本发明公开了一种自动化油茶脱壳榨油机,包括有脱壳箱体以及设置在脱壳箱体的内部的上齿轮去壳装置和下齿轮去壳装置,脱壳箱体内位于下齿轮去壳装置的底部设置有导流板,导流板的底部区域设置有转轴,转轴的外壁上焊接有若干根搅拌棒,转轴的底部设置有一根果壳送料螺杆,果壳送料螺杆的底部设置有一块多孔过滤板,多孔过滤板的底部设置有榨油装置,榨油装置的右侧设置有与榨油装置进行连通的果壳收纳装置,榨油装置的底部设置有油料收集装置,果壳收纳装置的底部设置有果壳加工装置。使用一台机器连续实现破壳、榨油、灌装、果壳收集、果壳磨碎一系列工艺过程,满足自动化生产的要求,制造成本更低,大幅提高生产的效率。
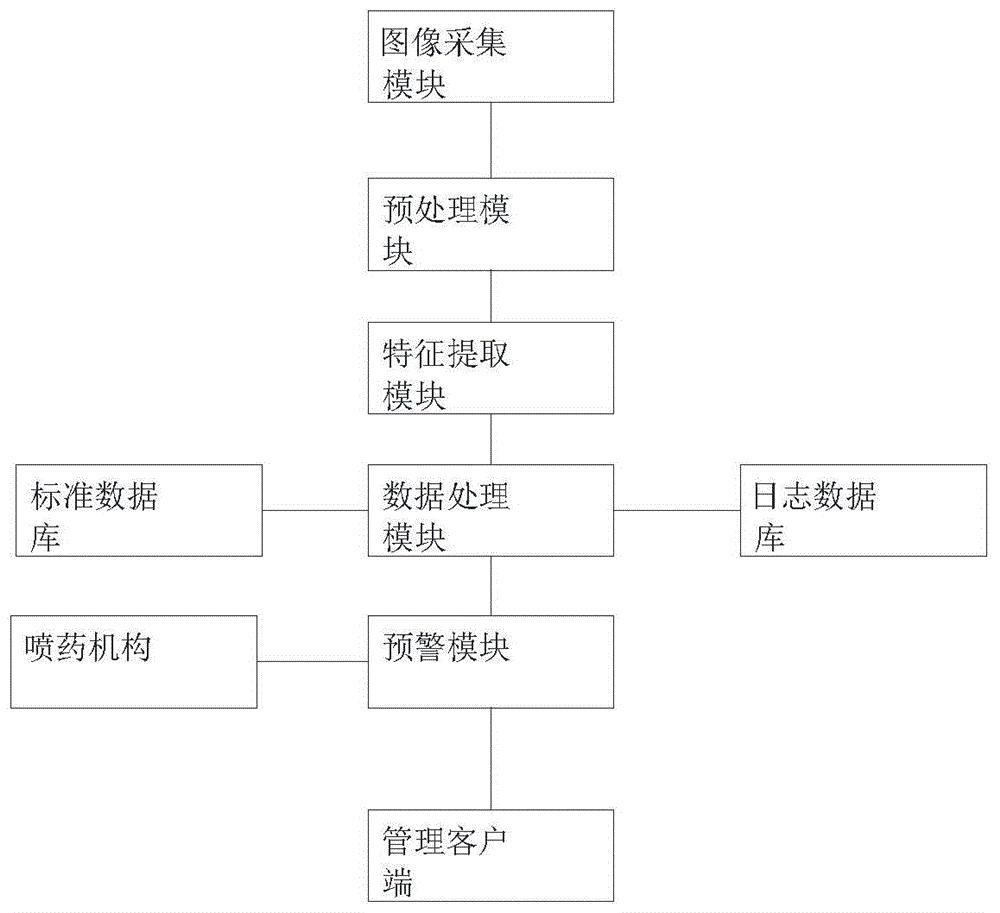
[发明]精品 G06T7/00
一种基于图像识别的柑橘果园病虫害识别与报警方法,包括如下步骤:S1:收集果树正常照片和遭受虫害的照片,保存到训练数据库中作为训练数据集;S2:预处理模块对训练数据集中的图片进行去躁和平滑预处理,用于加强数据集中图像的特征;S3:特征提取模块提取数据集中照片的特征,得到特征数据集;S4:数据处理模块训练图像识别模型,将特征数据集作为输入数据,图像识别模型输出果树是否发生虫害的结果。采用图像采集系统采集果林果树图像,通过,训练的图像识别模型对图像进行识别,排除了靠人工经验带来的误差和干扰,同时,大大的提高了效率和精确度。
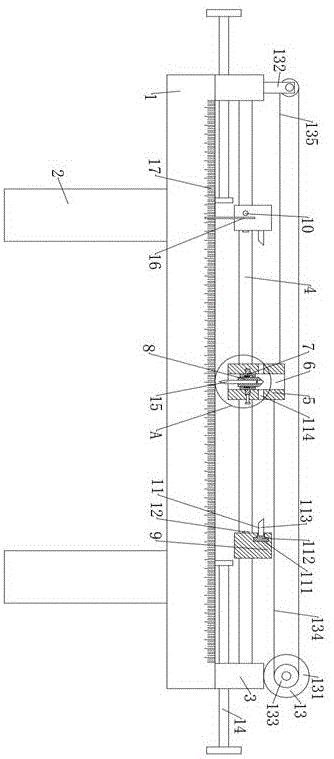
[实用新型]精品 B25H7/04
本实用新型公开了一种可横向划线标定的移动式机器人,通过移动组件带动浮动组件沿长孔内腔前后移动,浮动组件带动标定笔前后移动,同时驱动组件通过移动块可带动标定笔左右移动,则可使本机器人能够在钢材表面的任意位置进行标定,接近开关可使标定笔标定结束后实现电机反转,可实现本机器人对钢材左右两侧进行标定,省时省力,标定效率高;移动块移动过程中,当浮动筒和触发杆的斜面端配合时,触发杆迫使浮动筒带动标定笔下移并对钢材表面进行点标定,设置有参照杆和刻度线,可准确、直观的观察标定距离,设置有推动组件,可对操作台表面的钢材进行推动调整且可防止钢材产生位移,进而导致标定位置出错,标定准确率高。




