欢迎来到创智领睿!

[发明]精品 G06T7/00
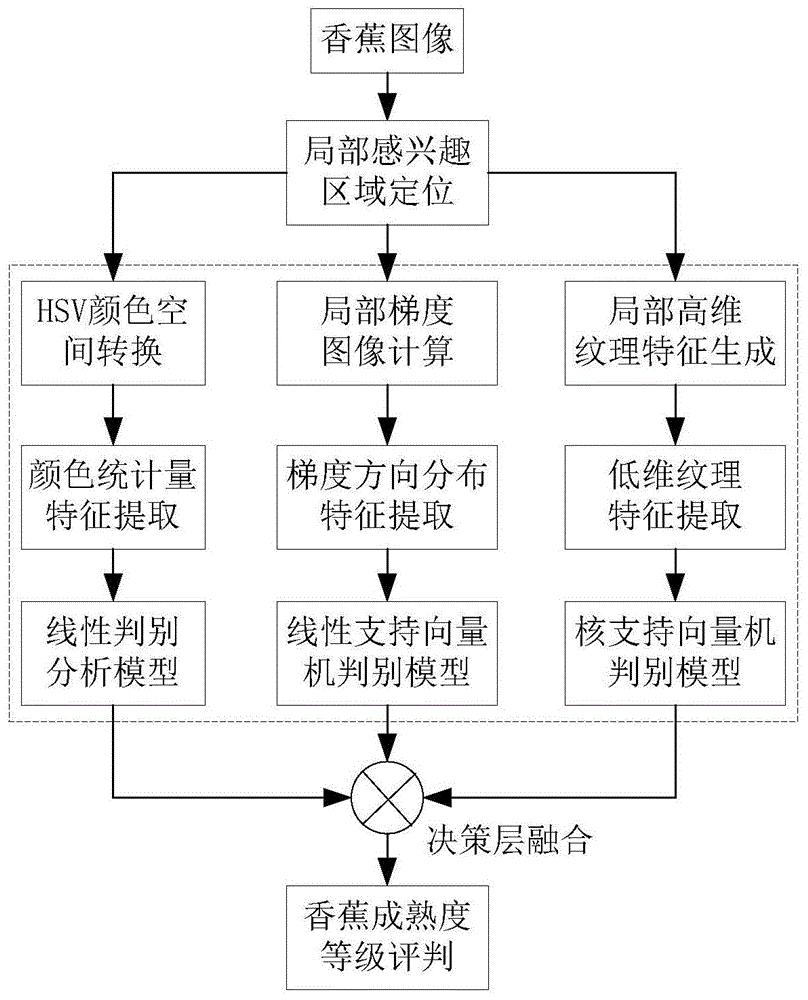
本发明涉及一种基于机器视觉的香蕉成熟度评判建模方法和评判方法,包括以下步骤:定位香蕉彩色图像上的感兴趣区域ROIs;提取ROIs的颜色统计量特征,根据颜色统计量特征采用机器学习方法建立基于色泽特征的香蕉成熟度判别模型;提取ROIs的局部梯度方向分布特征,根据局部梯度方向分布特征采用机器学习方法建立基于局部形状特征的香蕉成熟度判别模型;提取ROIs的局部纹理特征,根据局部纹理特征采用机器学习方法建立基于纹理特征的香蕉成熟度判别模型;对三个基于不同特征的香蕉成熟度判别模型分配权重,形成香蕉成熟度评判决策模型。本发明可以实现香蕉成熟度无损、准确的评判,使得香蕉成熟度等级评判操作更便捷、更客观、更准确,并具有较高的推广价值。
[发明]精品 G06Q10/06
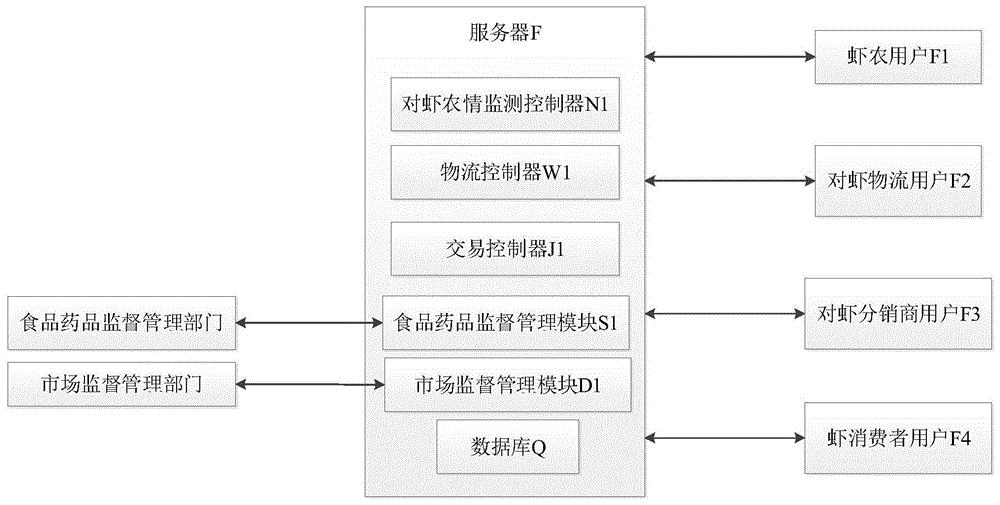
本发明公开了一种基于大数据分析与管理的对虾全产业链云服务系统,包括服务器,服务器内设置有对虾农情监测控制器、物流控制器、交易控制器、食品药品监督管理模块、市场监督管理模块和数据库,并连接有虾农用户、对虾物流用户、对虾分销商用户以及对虾消费者用户;对虾农情监测控制器用于进行养殖监测控制、封装数据采集控制;物流控制器用于对物流过程中的物流数据采集和运输进行控制;交易控制器用于对对虾交易过程中信息推送和交易操作进行控制。有益效果:基于服务器,将对虾养殖农情、物流、销售集中在一起,并且实现智能质量和市场价格监管。
[发明]精品 G06Q30/00
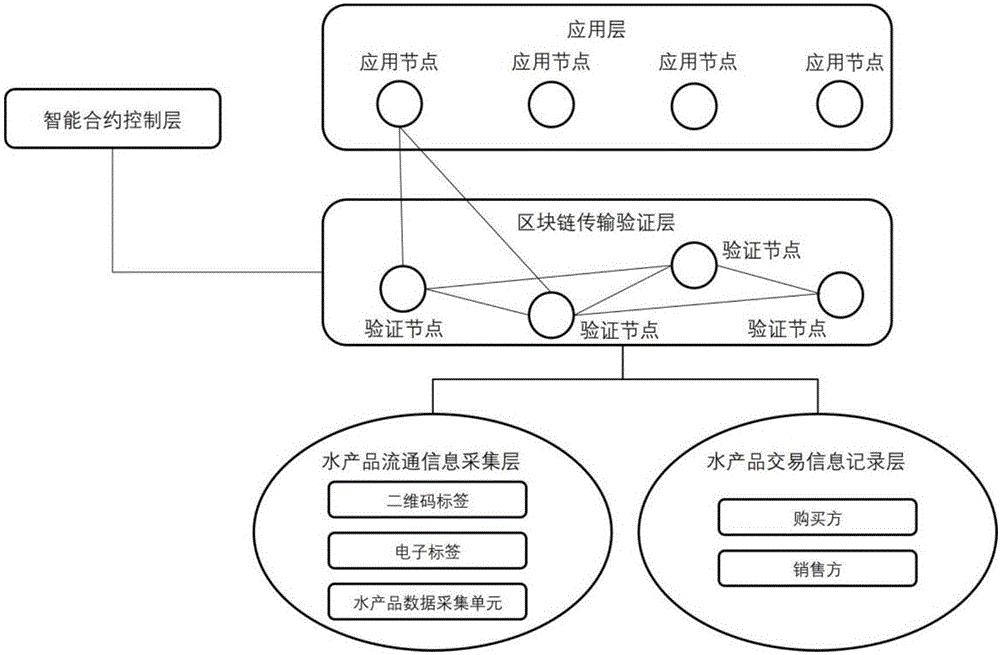
本发明提出了一种基于区块链的水产品流通追踪系统,用于对水产品从捕捞、运输到餐桌的全过程生成流通记录,建立去中心化的信用机制,保证流通记录的不可篡改,并且能够以较小的时间粒度执行对每批次水产品的流通时间追溯,从而满足水产品保鲜保活的时效性需求;同时,本发明降低了流通记录生效以及查询的时间延迟和通信开销,便于广大消费者的使用。
[发明]精品 G06Q10/08
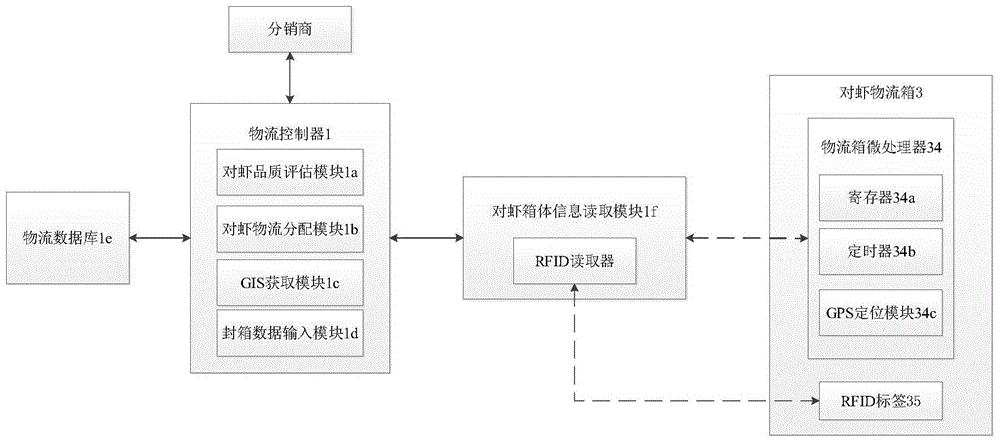
本发明公开了一种基于GIS和GPS的对虾全产业链物流管理系统,包括物流控制器,在该物流控制器上连接有对虾箱体信息读取模块,该对虾箱体信息读取模块用于读取对虾物流箱输出的对虾监测与物流数据;所述物流控制器内设置有对虾品质评估模块,该对虾品质评估模块用于对到达目的地的对虾品质进行评估;所述物流控制器内设置有对虾物流分配模块,用于二次物流分配;所述物流控制器内设置有定位GIS获取模块,用于根据GPS数据获取当前位置地理数据;所述物流控制器上连接有物流数据库。有益效果:实现物流数据实时上传,实时检测对虾在运输途中的活性,分销时,无需开箱,延长了对虾的寿命,保证了供应商的利益。
[发明]精品 G06T7/00
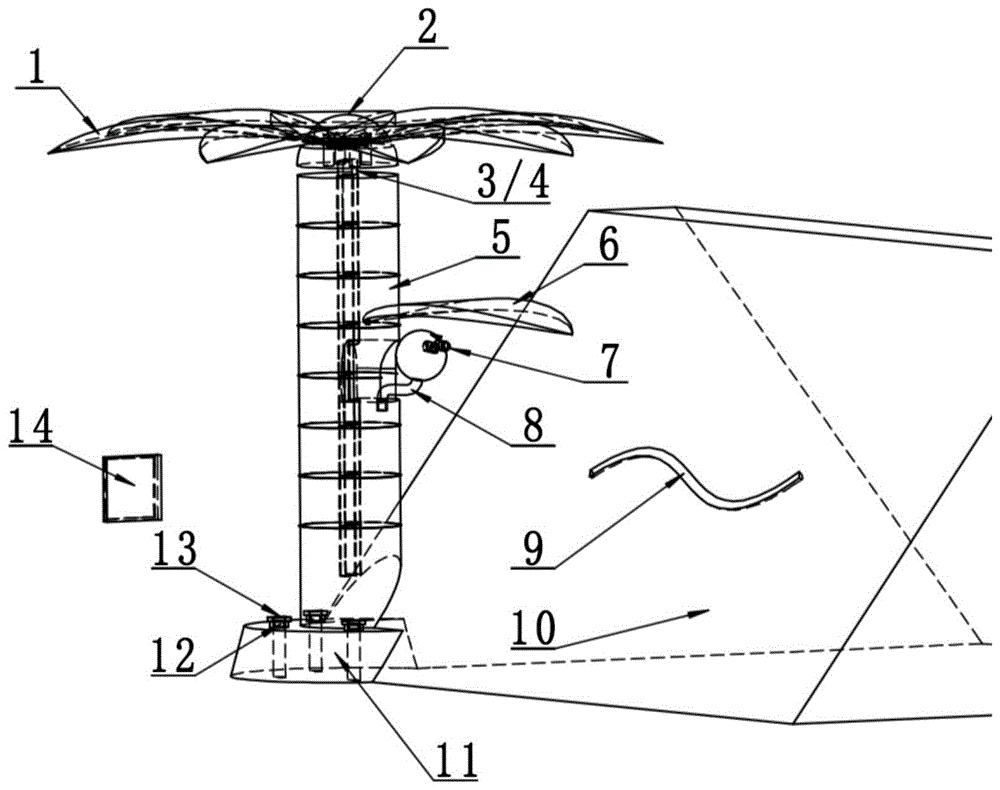
本发明公开了一种水库大坝护坡表面损伤视觉检测方法及仿生装置,该方法通过摄像机标定、获取校正图像、灰度化与平滑、改进Canny边缘检测、基于小波变换去噪、立体匹配、三维重构、评估损伤形式与程度,最后将相关数据反馈给用户。水库大坝护坡表面损伤视觉检测的仿生装置包括仿生水泥树和双目立体视觉系统即两个微型摄像机,仿生水泥树的中部设置有仿生白鹭头,双目立体视觉系统安装在仿生白鹭头上,仿生白鹭头可以通过转动来调整双目立体视觉系统的角度,实时监测水库大坝护坡表面的裂纹或凹坑等护坡损伤。本发明的成本低,结构简单,检测精度高,可以实时检测大坝护坡的表面损伤情况,节省技术测量人员。
[发明]精品 G07C9/10
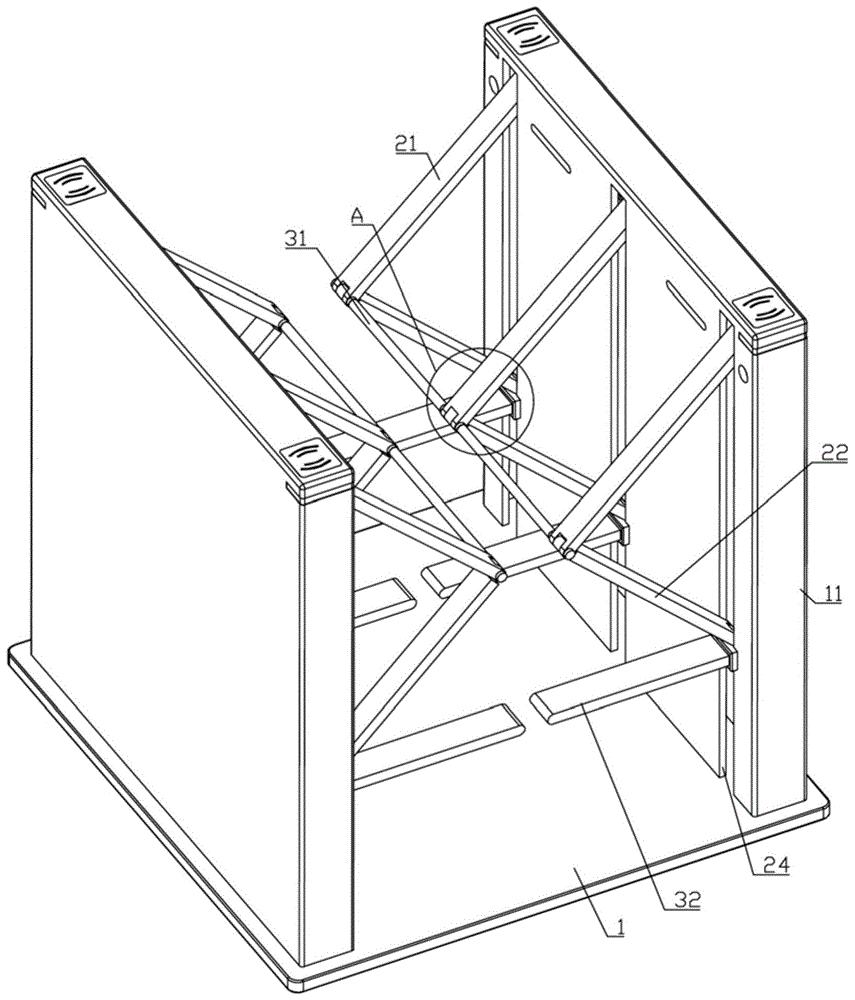
本发明属于门禁装置技术领域,具体涉及一种学生管理用门禁装置,包括底板,底板上端固定连接两个左右对称设置的闸机机构,闸机机构包括壳体,壳体内部上侧转动连接有前后方向设置的转杆,壳体内固定连接有能够驱动转杆转动的驱动组件,转杆设有拦截组件,该门禁装置通过驱动杆与从动杆转动为拱起状态形成闸板打开,同时通过驱动杆与从动杆转动为展平状态实现闸板关闭,由于没有存在较宽的实际闸板,所以壳体不用设置成较宽的宽度,这样整个闸机的总体宽度就不会较宽,相比现有的门禁闸机能够在有限的空间布置更多的闸机,这样便能提升学生的通行效率。
[发明]精品 B62D57/028
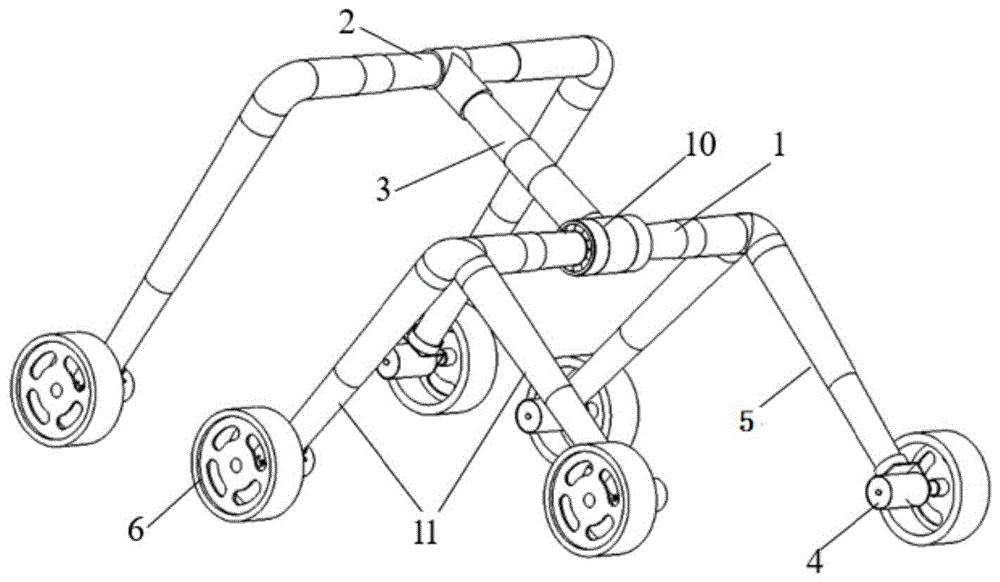
本发明公开一种可调体型大小的越障机器人,通过车头结构的双调心球连接结构连接双轮结构,在遇到障碍物时,障碍物造成的阻力使双轮结构围绕调心球轴承旋转,不断按照地形调整车轮水平高度,促使越障机器人完成越障动作,实现在预期地形中的越障工作。另外,通过调节电动推杆长度适应不同程度的崎岖地形及宽窄空间,进而更利于实现越障工作。本发明具备适应调整能力强、灵活性好及效率高的特点,同时车体的构造简单,易于维护,成本可控,普及度高。
[发明]精品 G05B19/04
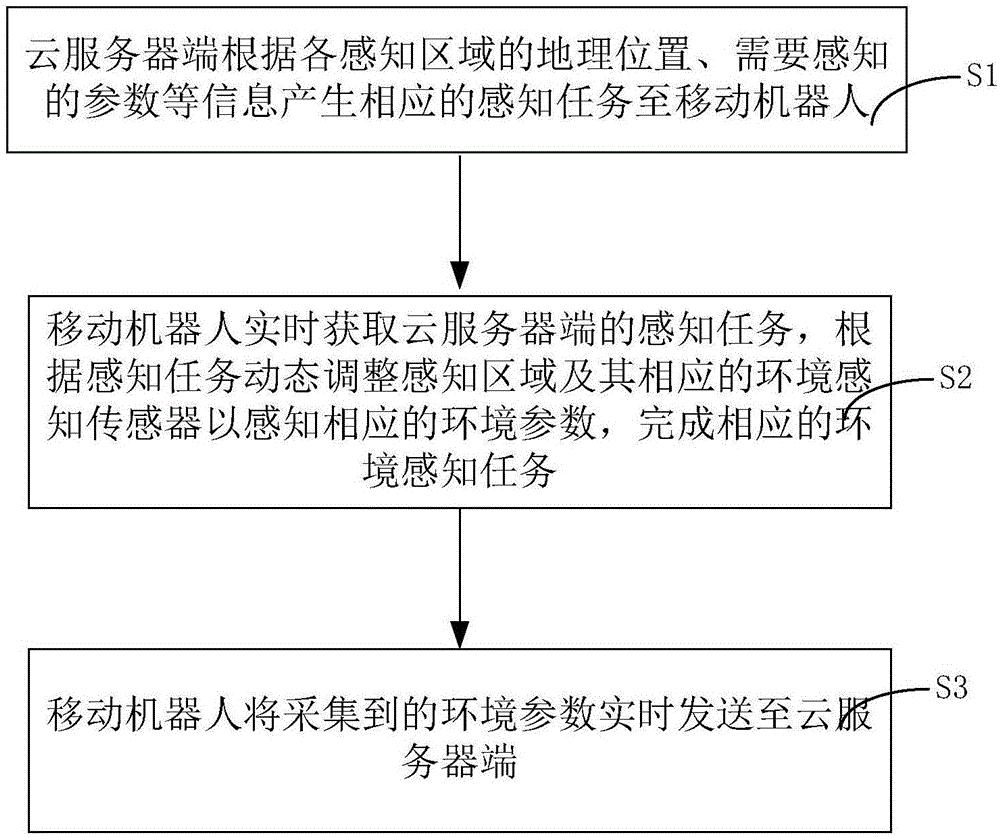
本发明公开了一种任务驱动的动态自适应环境感知移动机器人及系统、方法,所述方法包括:步骤S1,云服务器端根据各感知区域的地理位置、需要感知的参数等信息产生相应的感知任务至移动机器人;步骤S2,移动机器人实时获取云服务器端的感知任务,根据感知任务动态调整感知区域及其相应的环境感知传感器以感知相应的环境参数,完成相应的环境感知任务;步骤S3,移动机器人将采集到的环境参数实时发送至云服务器端,本发明通过云服务器端根据地理或空间位置,对移动机器人感知环境参数动态调整,使得移动机器人可根据不同的环境感知相应的环境参数,减少不必要的能耗。
[发明]精品 G06Q10/06
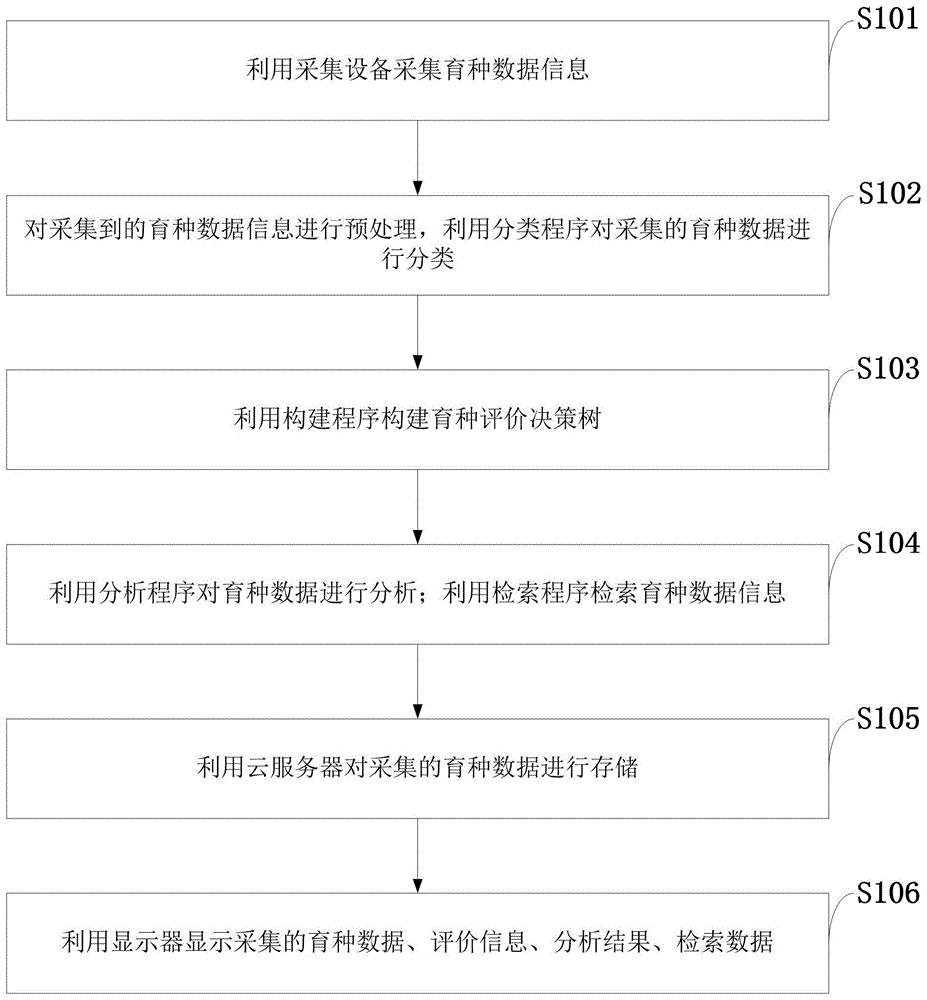
本发明属于育种信息处理技术领域,公开了一种基于决策树的作物育种信息测定系统及方法,所述基于决策树的作物育种信息测定系统包括:育种数据采集模块、主控模块、分类处理模块、评价决策树构建模块、分析模块、检索模块、云存储模块、显示模块。本发明通过评价决策树构建模块采用模型训练的方法,并结合置信区间法对模型进行后减枝,可以得到用于进行育种状况评估的育种评价决策树模型,提高育种评价准确率;同时,通过分析模块提高了分析结果的准确度,并且对于新加入的数据,可以直接带入决策树中,分析速度大幅提高,进而的提高育种数据分析效率。
[发明]精品 G05B19/414
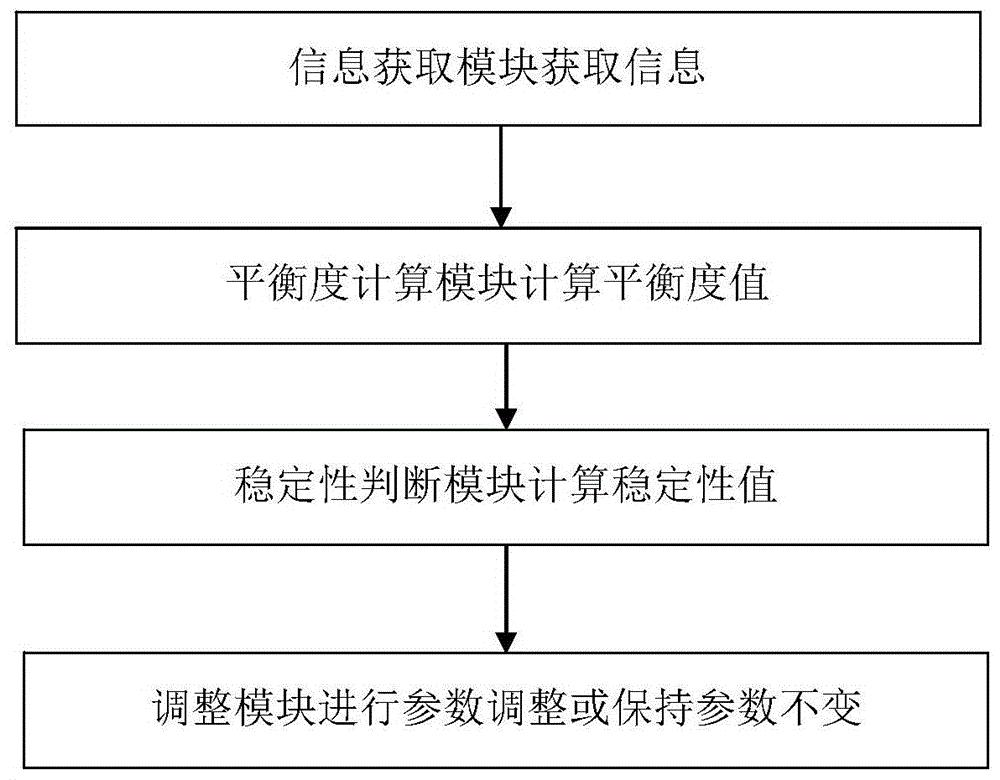
本申请提供一种农业机器人运动控制方法及系统,其特征在于:利用信息获取模块获取信息;利用平衡度计算模块计算平衡度值,利用稳定性判断模块计算稳定性值,利用调整模块进行参数调整或保持参数不变;利用本申请独创性提出的平衡度值和稳定性值计算方式,对拟进行变更的速度和/或加速度进行判断,如果变更值无法达到期望的平衡度值区间,则直接淘汰该变更方式,进行重新调整或保持不变;如果能够达到期望的平衡度值区间,则进一步计算稳定性值,如果能够达到期望的稳定性值区间,则允许变更,否则,若无法得出可行结果的情况下,进一步调整所述农业机器人的运动方向和/或增加所述双臂作为所述运动控制辅助。
[发明]精品 B65B25/04
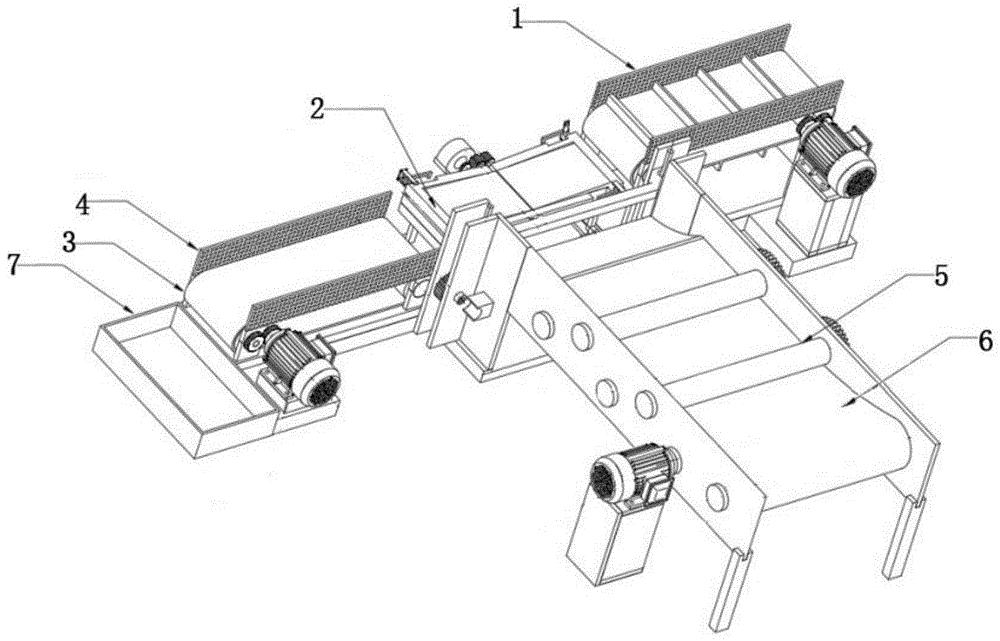
本发明公开了一种自动化果蔬裹袋式包装机,包括包装膜输送装置,所述包装膜输送装置用于将包装膜传输至热封机构并裁剪成等幅度的膜片,所述热封机构的两侧分别设有输入机构、输出机构,裹袋时,果蔬通过所述输入机构输入所述热封机构,所述热封机构将输入的膜片折叠并热封连接所述膜片的两端,将果蔬包裹在所述膜片之间。该自动化果蔬裹袋式包装机的结构简单,作业方式简单,便于操作,工作效率高,有利于降低果蔬套袋的成本,适合菠萝、萝卜、大白菜、马铃薯、玉米等果蔬进行缓冲包装的套裹。
[发明]精品 G01G1/02
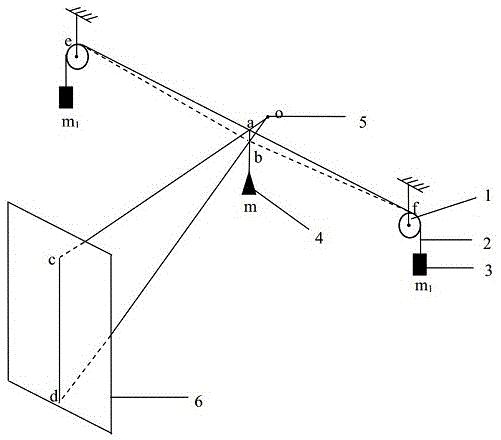
本发明公开了一种简易的微量和超微量样品重量检测装置和检测方法,其属于微量和超微量样品重量测量领域。本发明将待测样品的重量通过力学装置转化为微小的位移,然后通过光学理论将该位移进行投影放大,测量放大之后的位移大小获得原始微小位移大小,再结合力学平衡原理就可求出待测样品的重量,该测量装置结构简单,成品低廉。




