欢迎来到创智领睿!

[发明]精品 G05B13/04
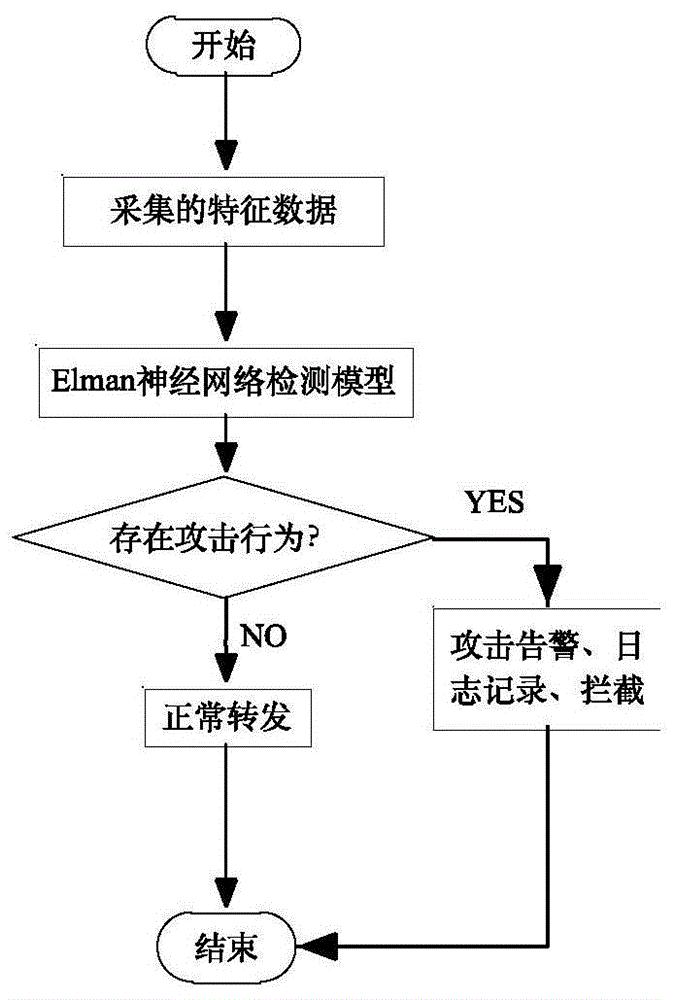
本发明公开了一种基于Elman神经网络的攻击识别方法,包括如下步骤:采集冷热电的状态数据,收集状态数据中能够表征冷热电三联供并网接口装置是否受到攻击的特征数据流;将特征数据流输入至Elman神经网络模型中进行实时检测并输出检测分类结果,当分类结果中存被归入网络攻击类的特征数据,则对状态数据进行拦截并发出报警;当分类结果中特征数据流均被归入正常类时,则将状态数据向上级调度中心进行转发。本发明还提供了一种并网接口装置。与现有技术相比,提高冷热电三联供系统的安全性以及运行的可靠性。
[发明]精品 G05F1/56
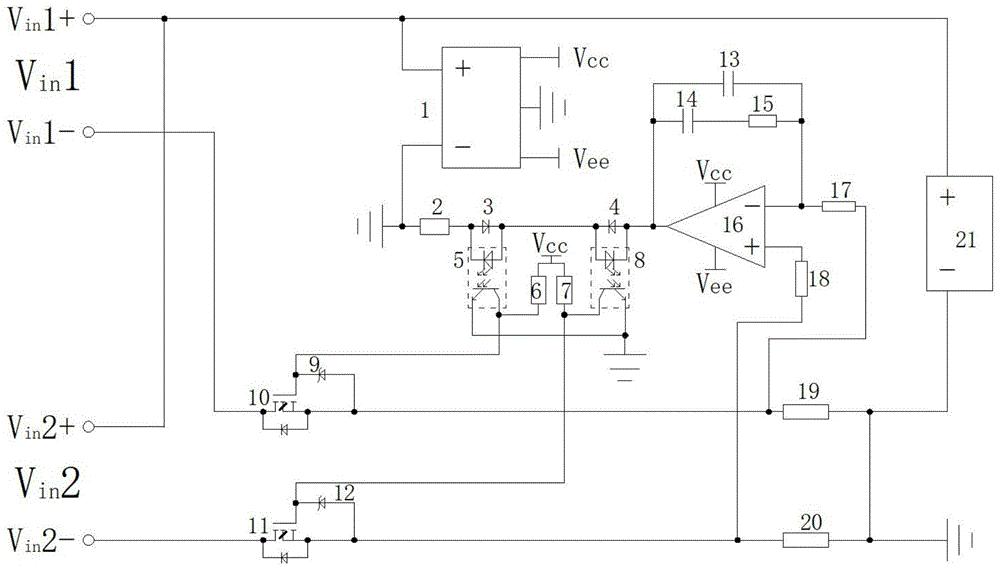
本发明公开了一种基于NMOS的低功耗冗余均流电路,属于电力电子技术领域,一种基于NMOS的低功耗冗余均流电路,包括开关电源、均流控制电路、均流MOS、电流采样电阻和负载,开关电源的输入端与负载端并联,开关电源的输出为正负电源,为均流控制电路提供正负电源供电,供电电源的正端分别连接开关电源和负载的正端,开关电源和负载的负端顺次连接电流采样电阻和均流MOS,再连接在供电电源的负端形成供电通路,为负载和开关电源供电,电流采样电阻和均流MOS均与均流控制电路连接,它可以实现降低对供电电源的输出电压一致性要求,降低了应用设备的电源成本,同时由于均流MOS处于低阻导通状态,降低了均流电路的功耗。
[发明]精品 G05B19/042
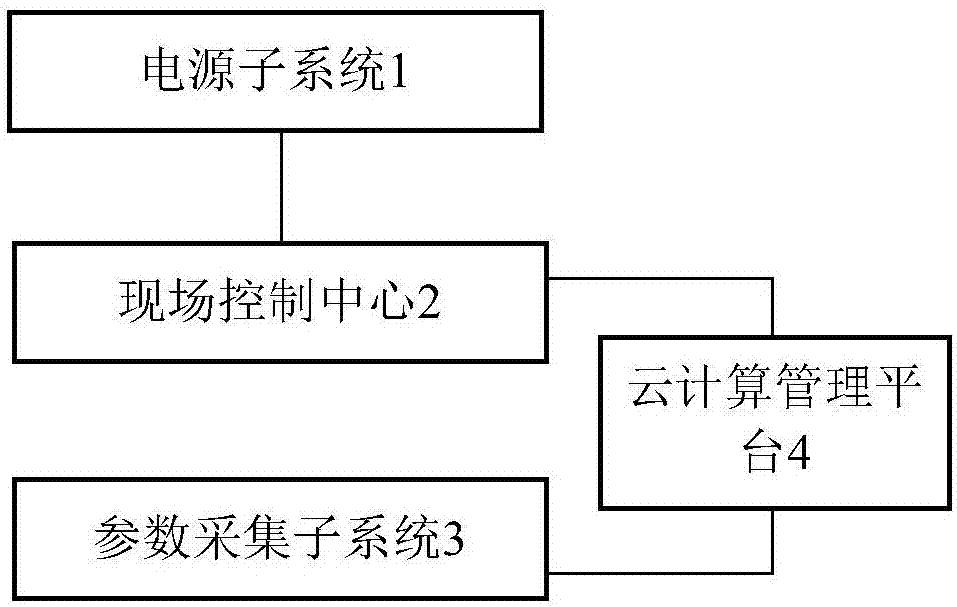
本发明提供了基于云计算的设备监控系统,包括电源子系统、现场控制中心、参数采集子系统和云计算管理平台,所述电源子系统与现场控制中心连接,现场控制中心与所述云计算管理平台之间、所述参数采集子系统与所述云计算管理平台之间均通过通讯网络相互通信。本发明能够在一个统一的平台下对很多个能耗设备集中进行监控,实现最大限度的节能降耗管理和网络化自动控制,从而实现能源的最优化配置,达到更好的节能效果。
[发明]精品 G05B19/048
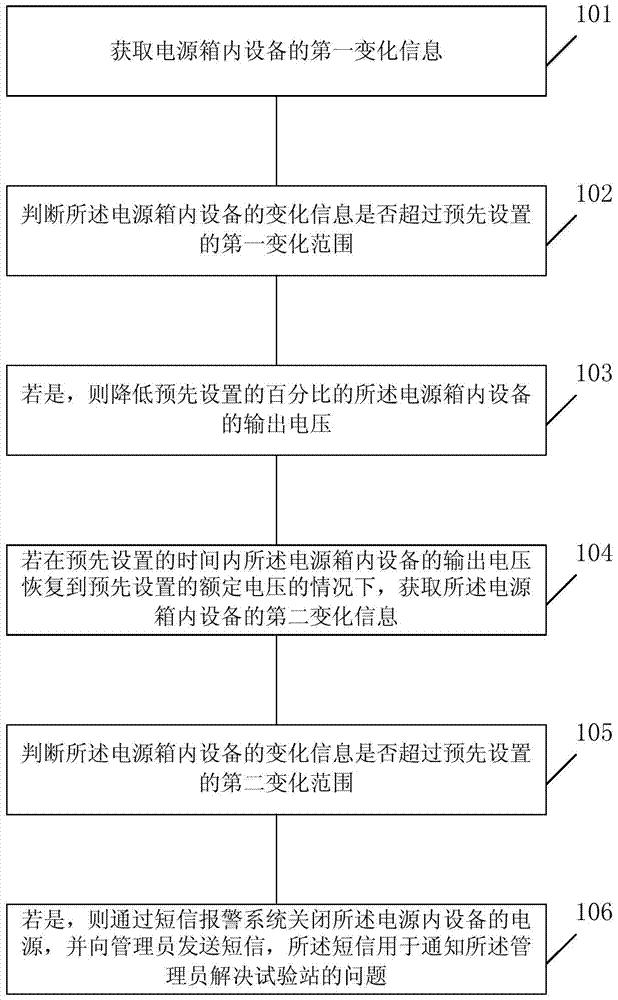
本发明实施例公开了一种无人值守试验站的方法及装置,通过获取电源箱内设备的第一变化信息;判断所述电源箱内设备的变化信息是否超过预先设置的第一变化范围;若是,则降低预先设置的百分比的所述电源箱内设备的输出电压;若在预先设置的时间内所述电源箱内设备的输出电压恢复到预先设置的额定电压的情况下,获取所述电源箱内设备的第二变化信息;判断所述电源箱内设备的变化信息是否超过预先设置的第二变化范围;若是,则通过短信报警系统关闭所述电源内设备的电源,并向管理员发送短信,所述短信用于通知所述管理员解决试验站的问题,从而实现自动处理自然污秽试验站并自动故障报警的目的。
[发明]精品 G05F1/56
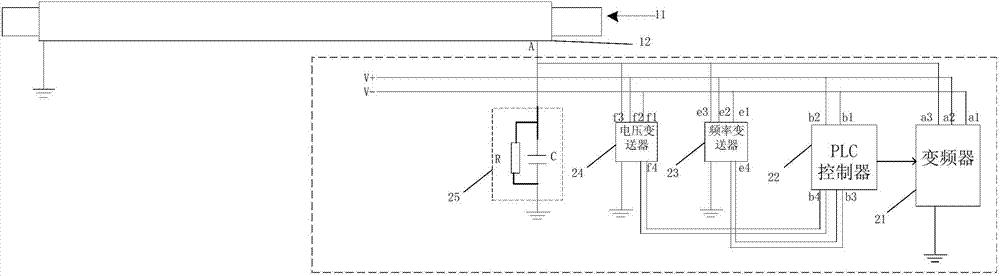
本发明公开一种二次控制电缆远端电压跟随装置及方法,包括有:二次控制电缆,其一开口端的屏蔽层接地,另一开口端定义为A端,该A端的屏蔽层通过高通滤波电路后接地;变频器,其电压输出端电性连接二次控制电缆屏蔽层的A端的屏蔽层,使之与屏蔽层感应电压一致;控制器,其检测二次控制电缆A端屏蔽层的电压信号和频率信号,并与变频器控制连接;电压源,为上述变频器和控制器供电。本发明可极大的降低电缆屏蔽层电磁环流;不影响屏蔽层对雷电流、操作过电压等干扰的屏蔽,而该类型屏蔽为电缆屏蔽层的主要屏蔽对象。
[发明]精品 G05B19/418
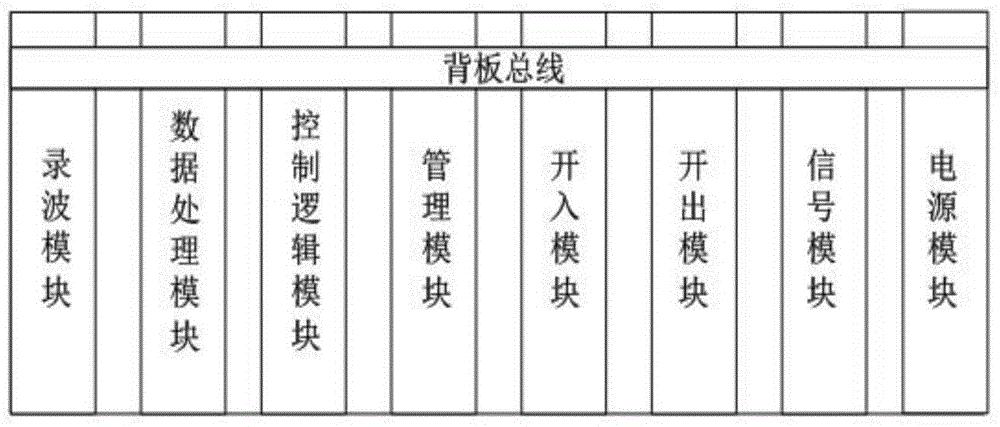
一种基于电网广域信息的阻尼控制装置,所述广域阻尼控制装置将核心的控制逻辑功能和电力控制装置相结合,布置于站端,通过获取广域量测信号后采用控制逻辑功能输出至本地受控系统。本申请采用模块化的硬件结构,就地化控制输出可避免调度远端集中控制方式的延时影响,提升了系统的运行稳定性。
[发明]精品 G05D1/10
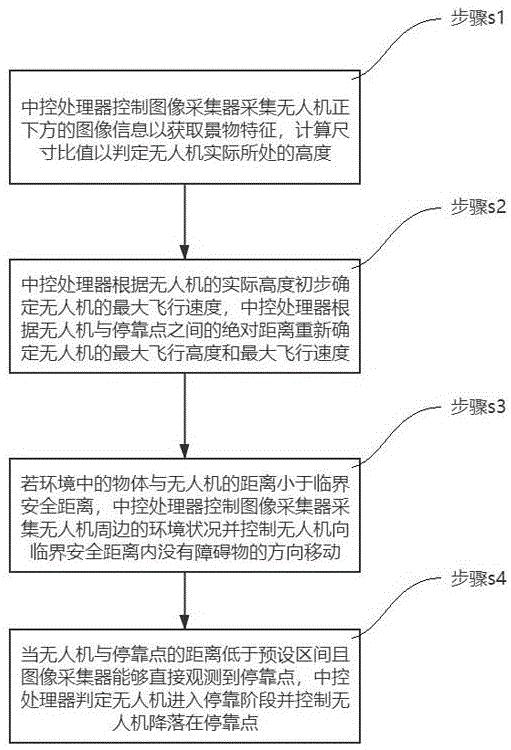
本发明涉及一种无人机巡检安全返航的避障方法,包括:采集图像信息以判定无人机的实际高度;根据无人机与停靠点之间的绝对距离重新调节最大飞行高度和最大飞行速度;若环境中的物体与无人机的距离小于临界安全距离,中控处理器控制无人机移动;当无人机进入停靠阶段,中控处理器控制无人机降落在停靠点。本发明通过采集无人机周边环境的图像信息,能够快速得到无人机周边的环境信息,从而使中控处理器能够根据实际情况快速得出无人机的飞行高度以及飞行速度,同时,对无人机飞行过程中会出现的障碍物进行提前预测,能够有效避免无人机与障碍物碰撞导致的无人机受到损坏或坠机的情况发生,有效提高了无人机的巡检效率。
[发明]精品 G05B17/02
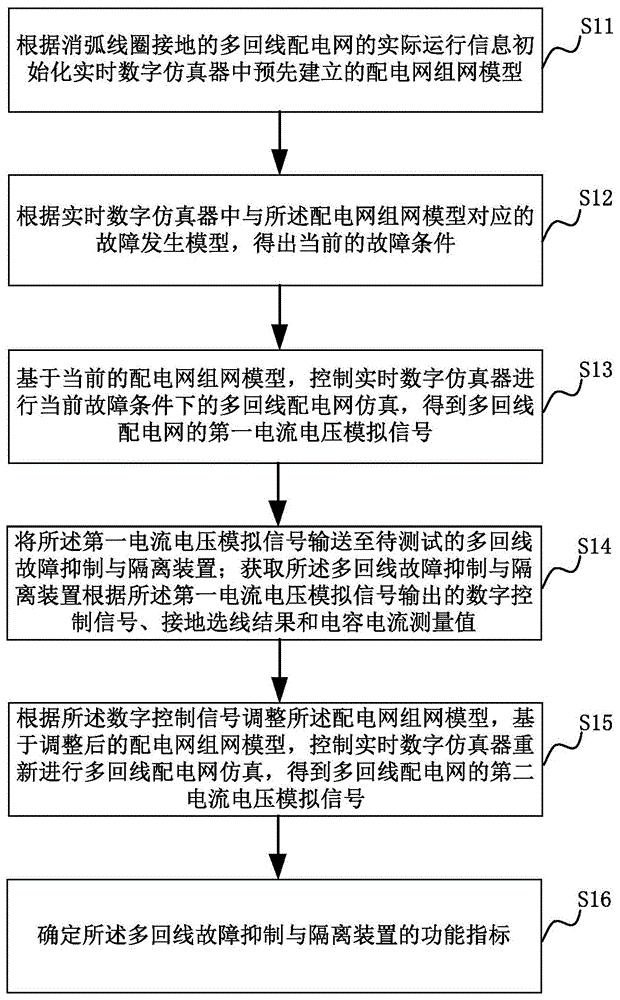
本发明涉及测试多回线故障抑制与隔离装置功能指标的方法,包括:根据多回线配电网的实际运行信息初始化实时数字仿真器中的配电网组网模型;根据故障发生模型得出当前的故障条件;控制实时数字仿真器进行当前故障条件下的配电网仿真,得到配电网的第一电流电压模拟信号;获取多回线故障抑制与隔离装置根据第一电流电压模拟信号输出的数字控制信号、选线结果和电容电流测量值;调整配电网组网模型,控制实时数字仿真器重新进行配电网仿真,得到配电网的第二电流电压模拟信号;根据故障条件、选线结果、电容电流测量值、第一及第二电流电压模拟信号,确定装置的功能指标。本发明能够全面测试多回线故障抑制与隔离装置的功能指标,测试成本低。

[发明]精品 G05D1/02
本发明公开了一种机器人姿态检测和作业控制方法及装置,用于通过倾角传感器对巡检机器人摆角进行实时采样,然后采用一种基于摆角值周期性正负异号特征来拟合摆角波形曲线的方法对采样序列进行正弦波形曲线拟合,得到摆角变化频率F和幅值A,与机器人运动安全数据比较来控制机器人的运动规划和巡检策略。本发明方法包括:获取倾角传感器实时采集到的机器人的横向摆角序列;对采集到的所述横向摆角序列进行正弦波形曲线拟合;通过分析所述正弦波形曲线特征获取摆角实时频率和幅值;根据预置的机器人运动安全数据和获取的摆角实时频率F和幅值A调整机器人运动规划和巡检策略。
[发明]精品 G05F1/67
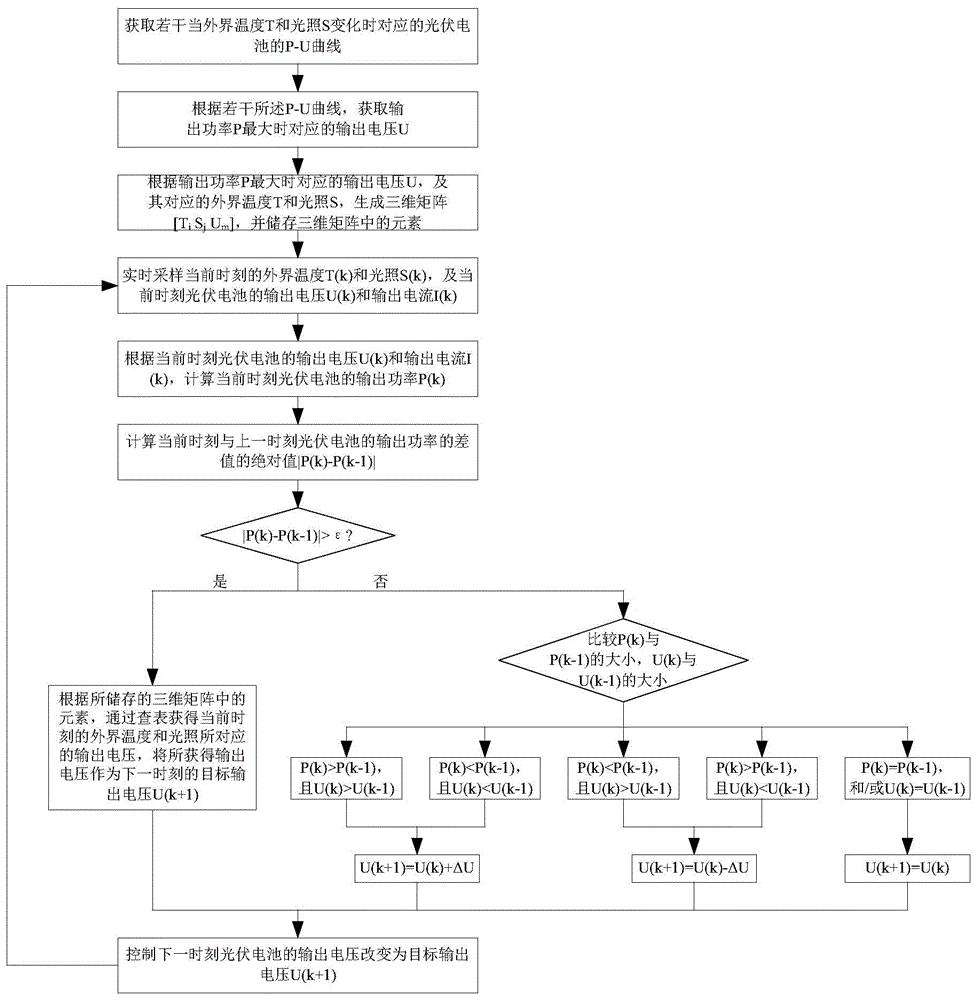
本发明提供了一种最大功率点跟踪方法、MPPT控制器及光伏发电系统,涉及光伏发电技术领域,能够解决现有的最大功率点跟踪方法精度不高、速度慢的问题。其中所述方法包括:生成三维矩阵[Ti Sj Um]。实时采样当前时刻的T和S及U和I。计算当前时刻光伏电池的输出功率P(k)。计算|P(k)‑P(k‑1)|,比较|P(k)‑P(k‑1)|与阈值ε的大小;若|P(k)‑P(k‑1)|>ε,则根据三维矩阵通过查表获得当前时刻的外界温度和光照所对应的输出电压,该输出电压作为下一时刻的目标输出电压;若|P(k)‑P(k‑1)|≤ε,则通过电导增量法确定下一时刻的目标输出电压。控制下一时刻的输出电压改变为目标输出电压。上述最大功率点跟踪方法应用于对光伏发电系统的控制过程中。
[发明]精品 G05B13/04
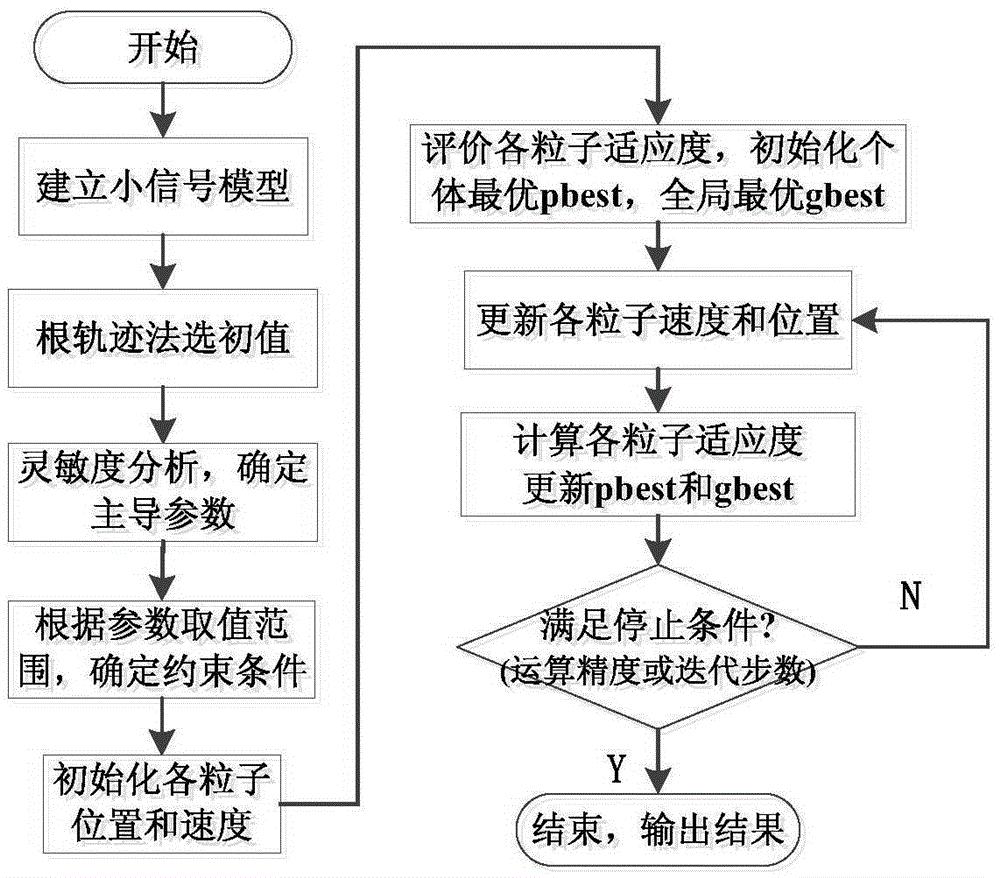
一种微电网小信号稳定性分析并参数协调整定的方法,属于电力系统微电网运行和控制技术领域。该方法步骤:建立需要参数优化设计的微电网的数学模型,包括网络及负荷小信号模型和逆变器小信号模型;用根轨迹法先确定微电网中各个参数,作为粒子群算法的初始值;通过特征值进行灵敏度分析,确定主导参数;确定各参数的取值范围或各参数间的数学关系,作为运用粒子群算法求解过程中的约束条件;确定初值、需要优化的参数和约束条件,利用粒子群算法进行参数优化,协调整定。本发明可以快速准确、具有协调性地确定各个参数,避免了参数逐个整定的繁琐,使系统在小信号稳定上更加稳定;灵活地调整目标函数和边界条件,大大缩短了工作时间,提高了效率。
[发明]精品 G05D1/10
本发明公开了一种电力线路巡检过程中飞行路径的动态规划方法,首先获取飞行器航迹规划区域内的电力线走廊激光点云数据;然后确定所述规划航线的航迹点;利用所述航迹点和航线规划算法生成初始飞行航线,将所述初始飞行航线载入所述飞行器的飞行导航及控制系统;获取飞行通道上障碍物的空间坐标和范围;根据所述障碍物的空间坐标和范围计算回避障碍物的航迹点,并利用航线规划算法计算得到所述飞行器避障和回归规划航线的最优飞行航线;将所得到的最优飞行航线载入所述飞行器的飞行导航及控制系统,实现飞行路径的动态规划。利用上述方法能够在线动态规划回避障碍物的飞行路线,从而实现电力线路巡检过程中障碍物的有效回避。




