欢迎来到创智领睿!

[发明]精品 G05B19/418
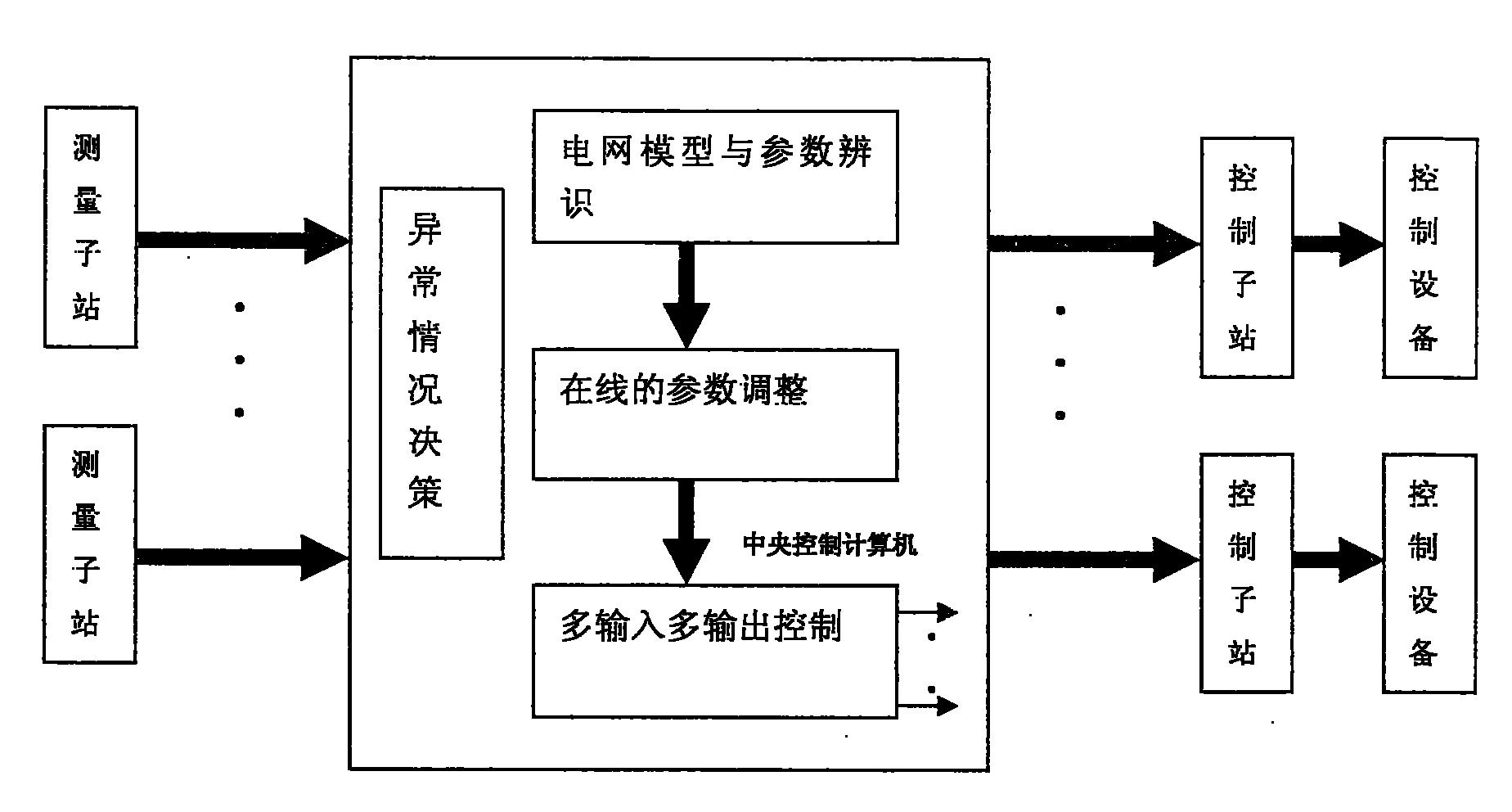
本发明涉及一种电力系统中多个控制设备的协调控制系统,包括经由通信通道连接的测量子站、中央控制计算机、多个控制子站及多个电力系统的控制设备;测量子站用于采集电网实时数据并发往中央控制计算机;中央控制计算机内部建立了多输入多输出控制器模块,中央控制计算机对实时数据进行电网模型与参数辨识、修正参数,并利用多输入多输出控制器模块同时发送多路协调优化指令控制多个控制子站;多个控制子站控制多个电力系统的控制设备,并统一协调多个控制设备的动作。另外,本发明还提供了电力系统中多个控制设备的协调控制系统的控制方法。本发明能有效抑制电力系统功率扰动的现象,提高电力系统的稳定性。
[发明]精品 G05B13/00
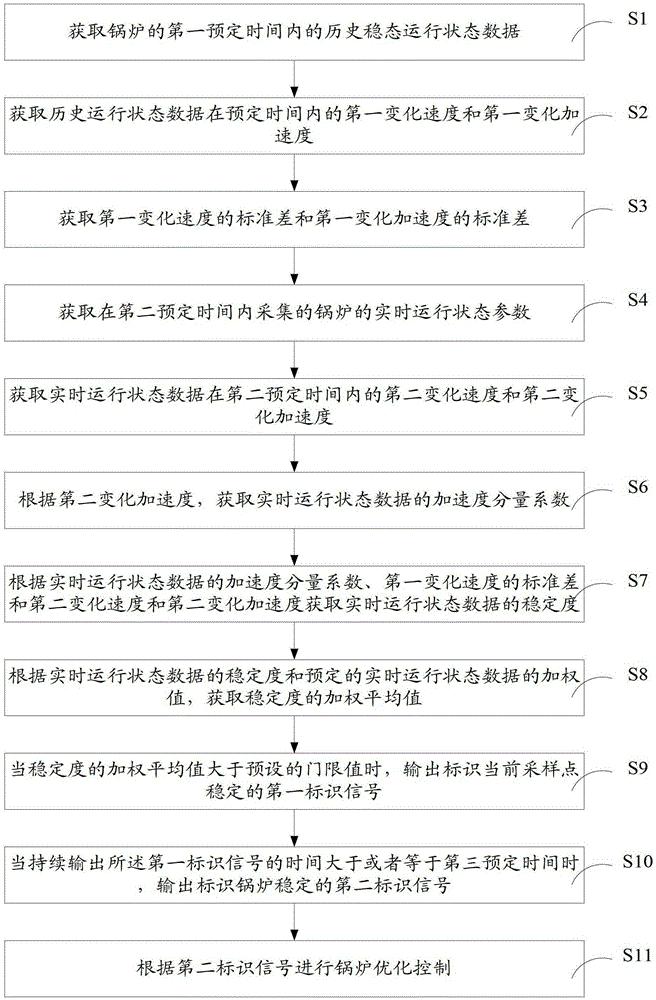
本发明提出一种电站锅炉优化方法,包括步骤:获取锅炉的第一预定时间内的历史稳态运行状态数据;获取第一变化速度和第一变化加速度;获取第一变化速度的标准差和第一变化加速度的标准差;获取实时运行状态参数;获取第二变化速度和第二变化加速度;获取实时运行状态数据的加速度分量系数;获取实时运行状态数据的稳定度;获取稳定度的加权平均值;当稳定度的加权平均值大于预设的门限值时,输出标识当前采样点稳定的第一标识信号;当持续输出第一标识信号的时间大于或者等于第三预定时间时,输出标识锅炉稳定的第二标识信号;根据第二标识信号进行锅炉优化控制。本发明还提出一种电站锅炉优化系统,其实现简单,可以提高电站锅炉优化效果。
[发明]精品 G05B23/02
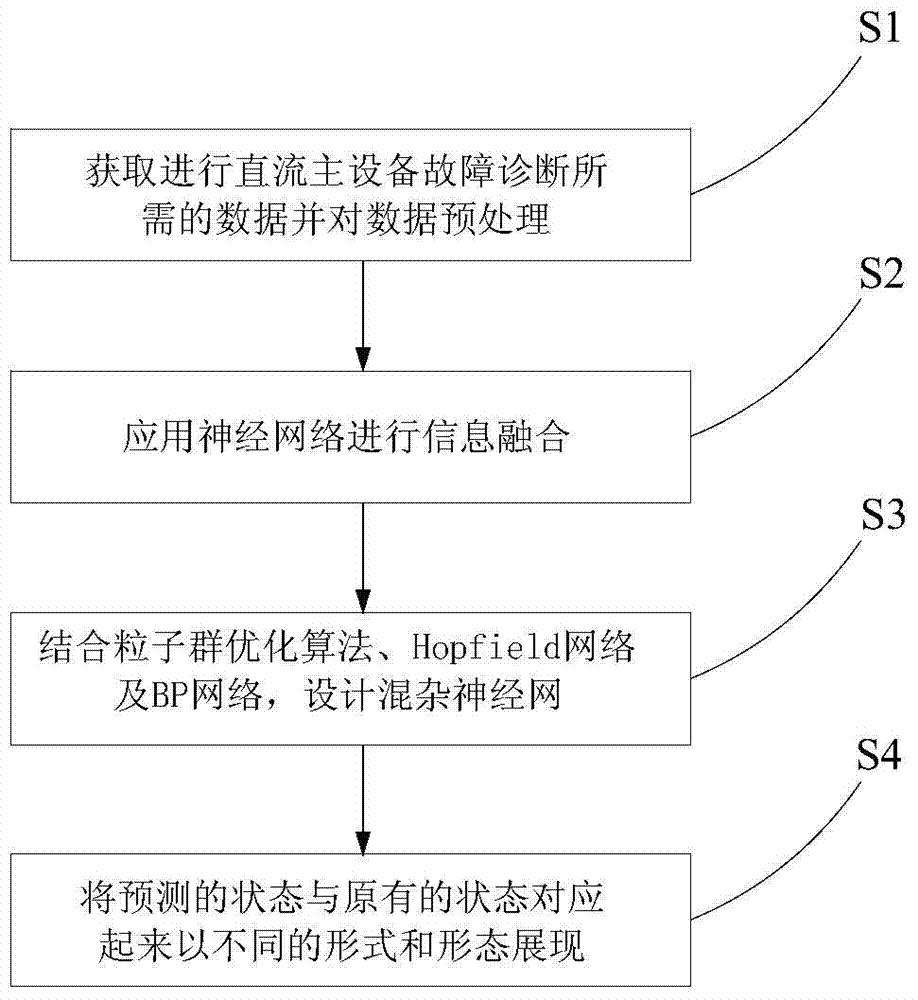
本发明公开了一种基于混杂神经网络的直流主设备故障诊断方法,其包括以下步骤:步骤1、获取进行设备故障诊断所需的关联数据,所述关联数据包括源数据和实时数据,其中所述源数据为离线实验数据、带点实验数据,在线监测数据,各种巡检数据组成的历史数据;步骤2、应用神经网络对所述关联数据进行信息融合;步骤3、结合粒子群优化算法、Hopfield网络及BP网络,设计混杂神经网络,对步骤2中进行信息融合后的关联数据进行预测,以获取直流主设备的预测状态;步骤4、将所述预测状态与直流主设备的原始状态对应起来,以不同的形式或/和形态展现,所述原始状态为源数据所体现的历史状态。本发明提高故障设备的检修效率和电网运行的可靠性。
[发明]精品 G05B13/00
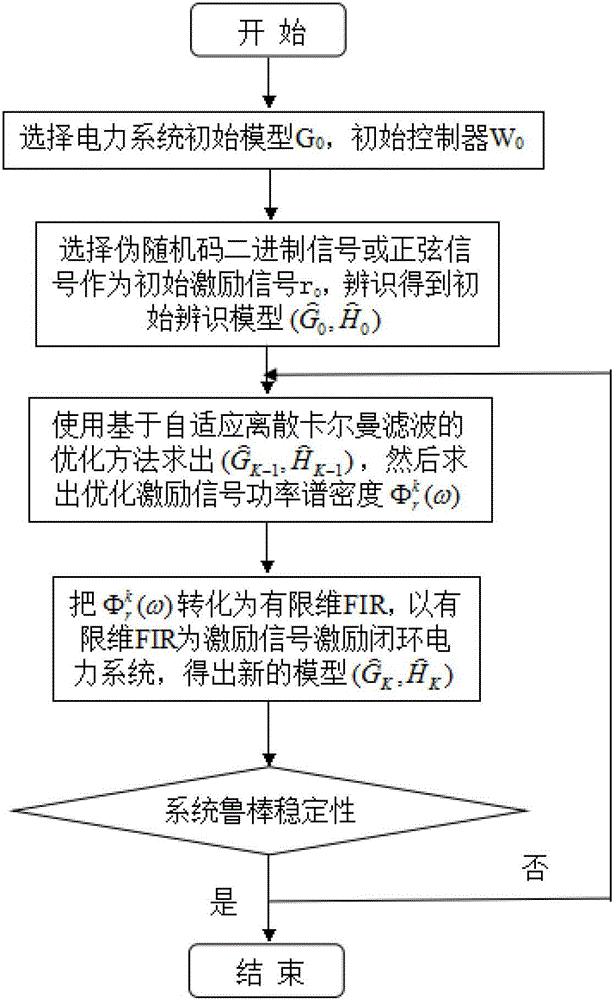
本发明公开了一种提高电力系统闭环辨识准确性的激励信号优化方法,属于电力系统辨识与控制技术领域。该方法采用伪随机码二进制信号或正弦信号作为初始激励信号,辨识得到初始辨识模型;基于自适应离散卡尔曼滤波的优化方法求出第K-1步的辨识模型,根据第K-1步的辨识模型求出优化激励信号功率谱密度并转化为有限维FIR作为激励信号激励闭环电力系统,得出第K步的辨识模型及该模型相应的控制器Wk;通过第K步的辨识模型及该模型相应的控制器Wk判断该第K步的辨识模型是否满足闭环电力系统鲁棒稳定性,若是将得到的有限维FIR作为最终的优化激励信号。通过本发明方法可以得到较为准确的电力系统辨识模型,从而进一步地解决电力系统辨识模型的准确性问题。
[发明]精品 G05B13/00
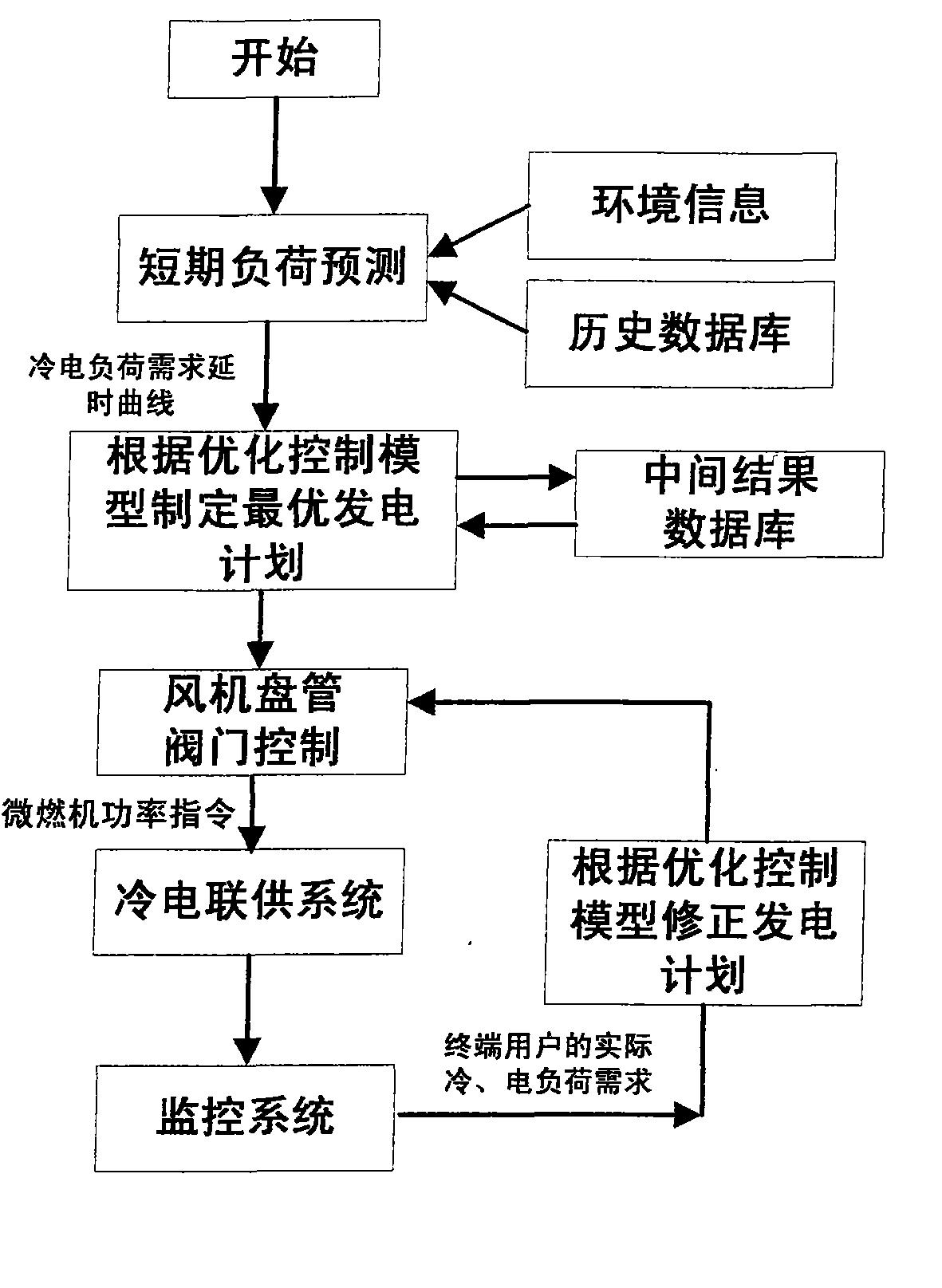
本发明属于电力系统分布式发电供能系统能量管理的技术领域。该控制方法包括:在每个工作日运行联供系统之前,从历史数据库中取出终端用户的历史冷、电负荷数据,通过短期负荷预测得到终端用户该工作日全天的冷负荷和电负荷延时变化曲线;根据负荷预测结果,采用优化控制数学模型制定联供系统的最优发电出力计划;在联供系统运行过程中利用从分布式控制系统获得的终端用户实时冷、电负荷需求,重新进行优化控制计算,修正联供系统的发电量和制冷量。本发明利用分布式监控系统监测终端用户的实际冷、电负荷功率需求,并能够实时修正负荷预测结果,在线校正联供系统的各控制量。
[发明]精品 G05B17/02
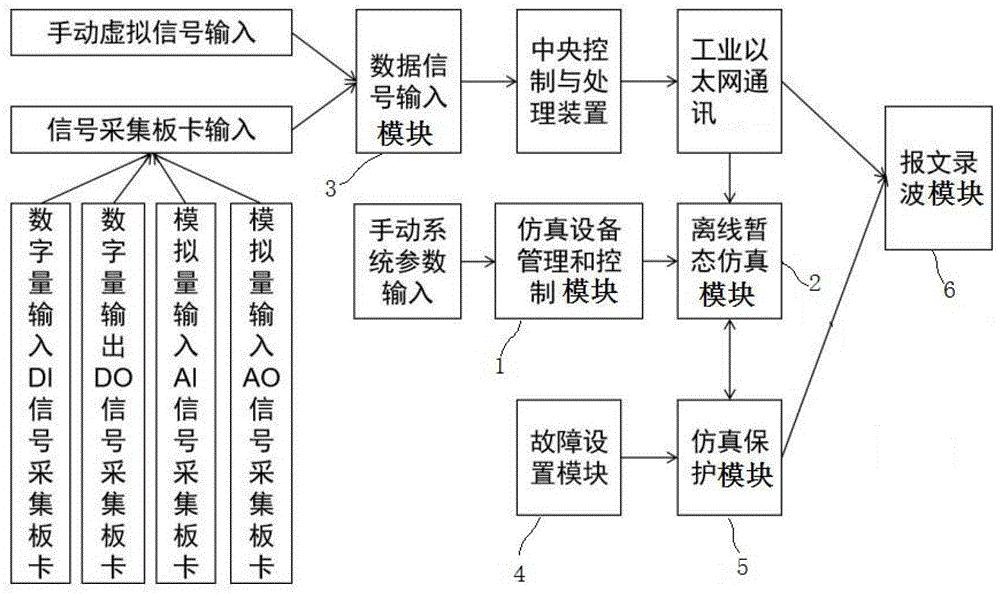
本发明公开了一种高压直流阀冷系统暂态离线仿真系统,包括:仿真设备管理和控制模块,其预先搭建阀冷系统的设备元件,并可根据所输入的设备元件参数来调整设备元件状态,以使得所搭建的仿真模型与实际工程保持一致;离线暂态仿真模块,其用于离线搭建和操作仿真模型;数据信号输入模块,其用于将实际阀冷工程的运行信号以及需要仿真的量输入至离线暂态仿真模块中,以得到运行仿真模型;故障设置模块,其用于在运行仿真模型中设置阀冷系统工艺流程中不同结点的各类故障;仿真保护模块,其用于将运行仿真模型的运行参数和设定好的对应运行参数的保护定值整定参数进行比对。
[发明]精品 G05D1/06
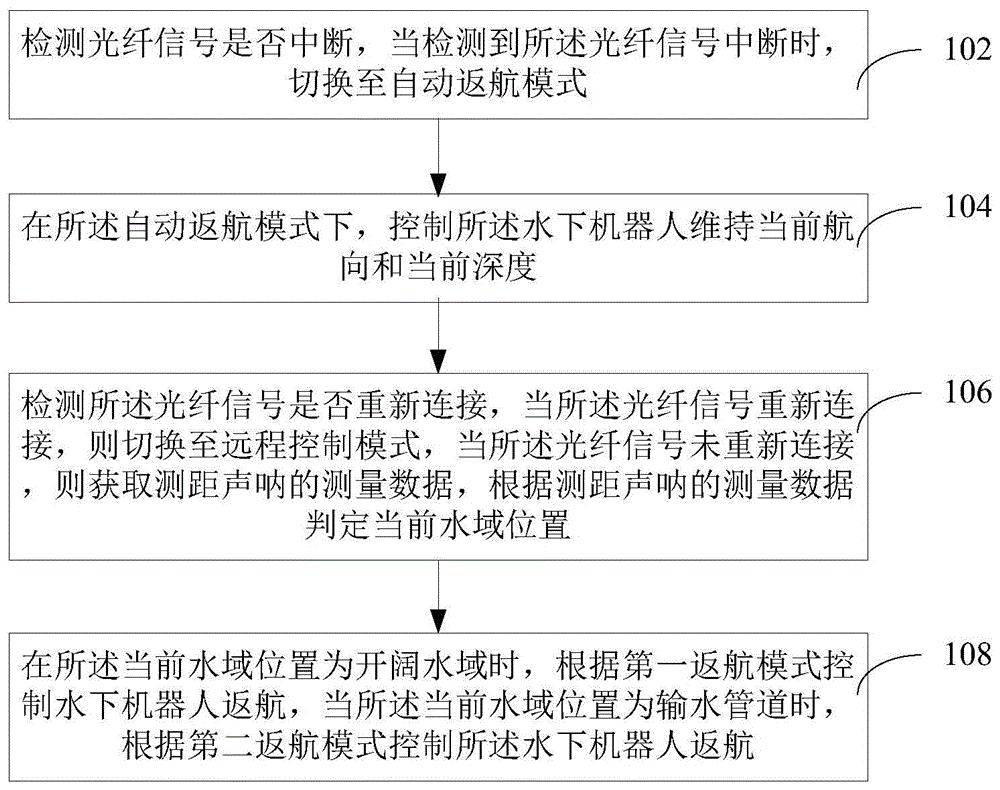
本发明涉及一种水下机器人返航控制方法、计算机和存储介质,包括:当检测到光纤信号中断时,切换至自动返航模式,控制水下机器人维持当前航向和当前深度,当光纤信号重新连接,则切换至远程控制模式,当光纤信号未重新连接,则获取测距声呐的测量数据,根据测距声呐的测量数据判定当前水域位置;在当前水域位置为开阔水域时,根据第一返航模式控制水下机器人返航,当当前水域位置为输水管道时,根据第二返航模式控制水下机器人返航。在水下机器人的光纤信号中断后,控制水下机器人维持当前航向和当前深度,以避免水下机器人不可控而导致航行混乱,使得水下机器人的返航更为便捷和高效,避免水下机器人滞留在输水管道内,从而消除安全隐患。
[发明]精品 G05B19/042
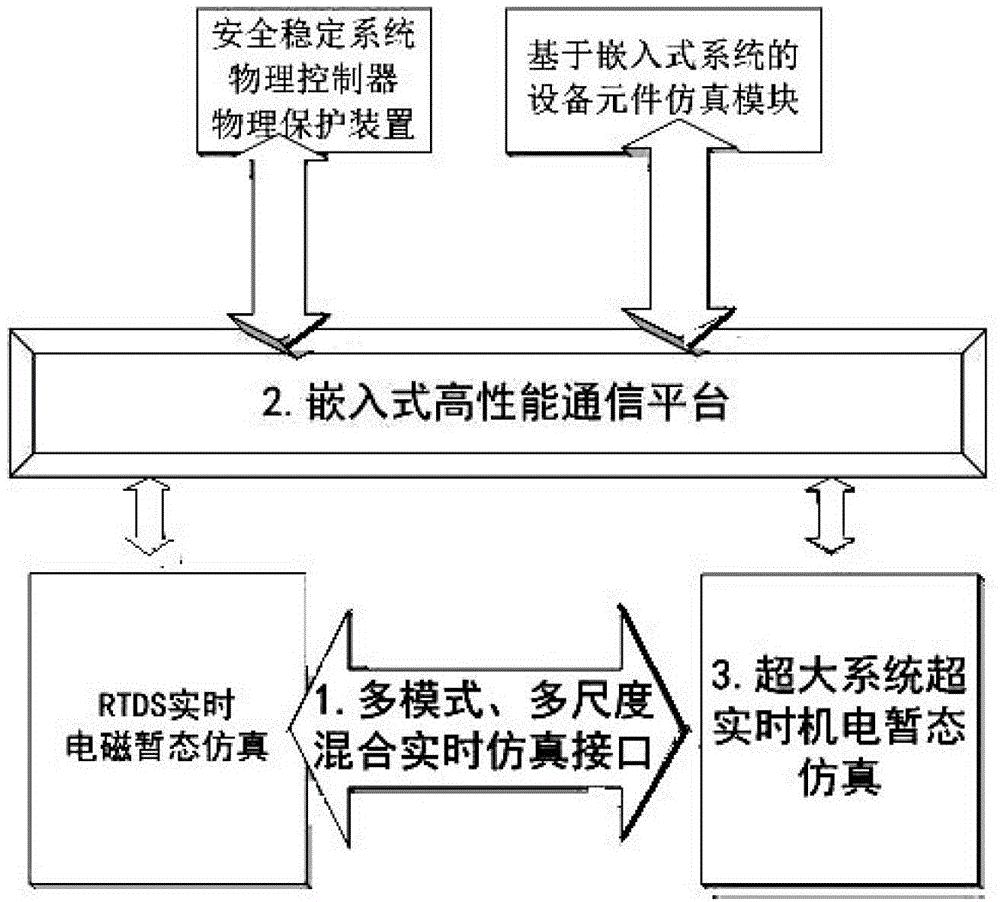
本发明公开了一种电磁机电混合实时仿真数字化接口的控制方法,包括以下步骤:在数字化接口中设置数字电位器、通讯模块、延时检测模块、接通切断控制器、电磁仿真数据采集电路和机电暂态仿真数据采集电路,控制器;将通讯模块与接通切断控制器之间通过高速总线连接;接通切断控制器接通通讯模块;控制器比对电磁仿真数据和机电暂态仿真数据进行时标比对;接通切断控制器切断通讯模块的通讯连接,控制器计算电磁仿真数据传递耗时,对耗时做出耗时补偿;在控制器中对将补偿后的电磁仿真数据与机电暂态仿真数据进行数据混合;控制器检测数字电位器的噪声误差。本发明的方法能够有效控制延时和噪声。
[发明]精品 G05D13/04
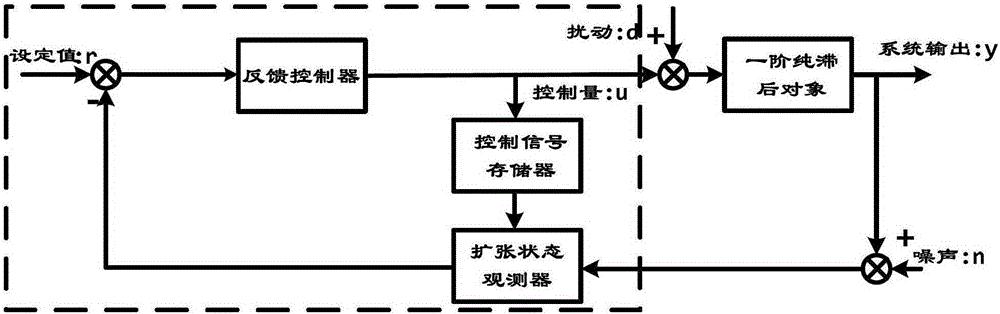
本发明提供一种一阶纯滞后对象自抗扰控制系统及其控制方法,所述自抗扰控制系统包括有控制信号储存器,所述控制信号储存器获取并储存被控对象的控制输入量,将所述控制输入量延迟预设时间后输出至扩张状态观测器,因此,能够补偿被控对象的输出量发生延迟滞后的情况下,被控对象输出和上一时刻的控制输入量不对应。使所述扩张状态观测器所接收到的两个输入(被控对象输出和上一时刻的控制输入量)能够更加准确地一一对应,能实现扩张状态观测器的两个输入量时间方向的统一,提高观测精度,进而大大闭环控制效果,使自抗扰控制更加稳定,能够更准确地对一阶纯滞后对象进行自抗扰控制。
[发明]精品 G05B17/02
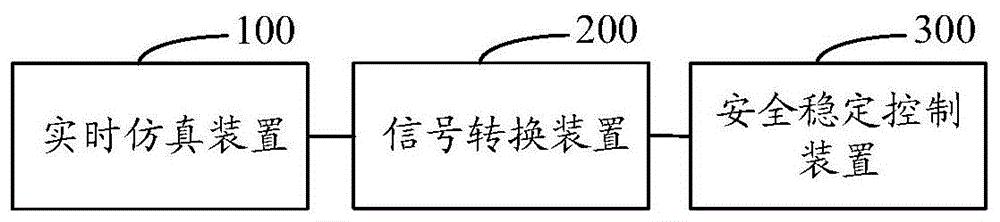
本发明涉及一种安全稳定控制装置远程实时仿真系统,包括实时仿真装置、信号转换装置以及安全稳定控制装置,实时仿真装置与信号转换装置连接,信号转换装置与安全稳定控制装置连接,实时仿真装置接收直流闭锁故障指令,进行实时仿真,将得到的模拟量信号发送至信号转换装置,信号转换装置将模拟量信号转换为第一信号发送至安全稳定控制装置;安全稳定控制装置接收第一信号并根据预设策略表发出切机切负荷指令至信号转换装置,信号转换装置将切机切负荷指令转换成第二信号发送至实时仿真装置,实时仿真装置根据第二信号,执行切机切负荷动作,并将当前系统状态发送至安全稳定控制装置,当当前系统状态为系统稳定状态时,安全稳定控制装置执行切机切负荷指令。
[发明]精品 G05B13/04
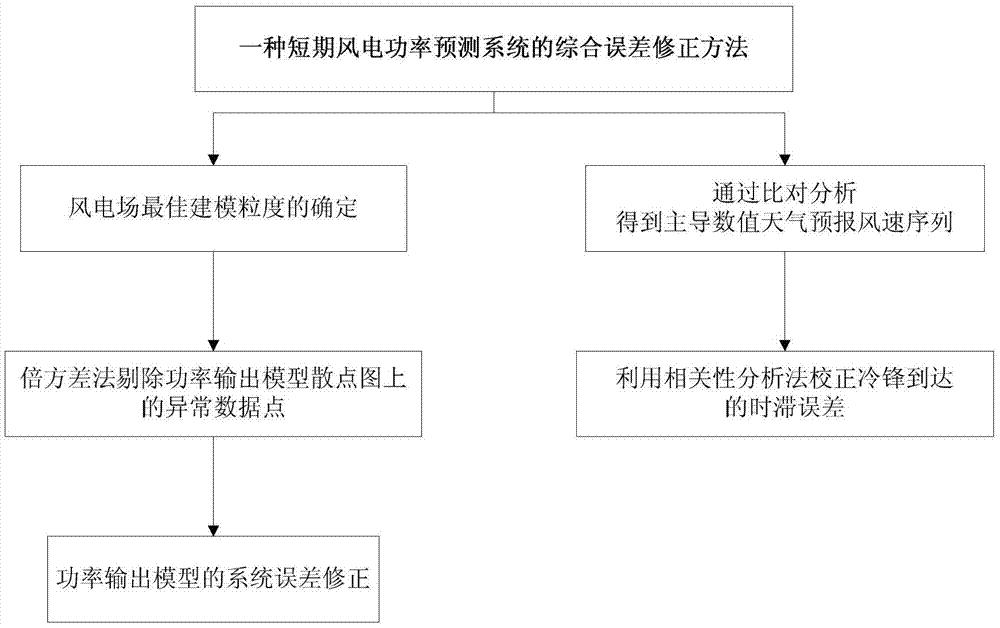
本发明公开了一种短期风电功率预测系统的综合误差修正方法,该方法包括风电场功率输出环节误差修正和数值天气预报环节误差修正,风电场功率输出环节误差修正步骤,计算功率输出模型的最佳建模粒度,用多台风机建模替代单机建模后累加,利用倍方差法剔除功率输出模型散点图上的异常数据点,利用相关因子修正功率输出模型的系统误差。数值天气预报环节误差修正步骤,通过对比实测风速和不同时空发生数值天气预报风速的相关系数和系统误差修正,得到主导数值天气预报风速序列,利用相关性分析法校正冷锋到达的时滞误差。本发明针对现有短期风电功率预测系统输入数据质量较低的问题,对于各类短期风电功率预测方法,具有普遍适用性,且便于应用于工程实际,能显著提高短期风电功率预测的建模精度和预测精度。
[发明]精品 G05D27/02
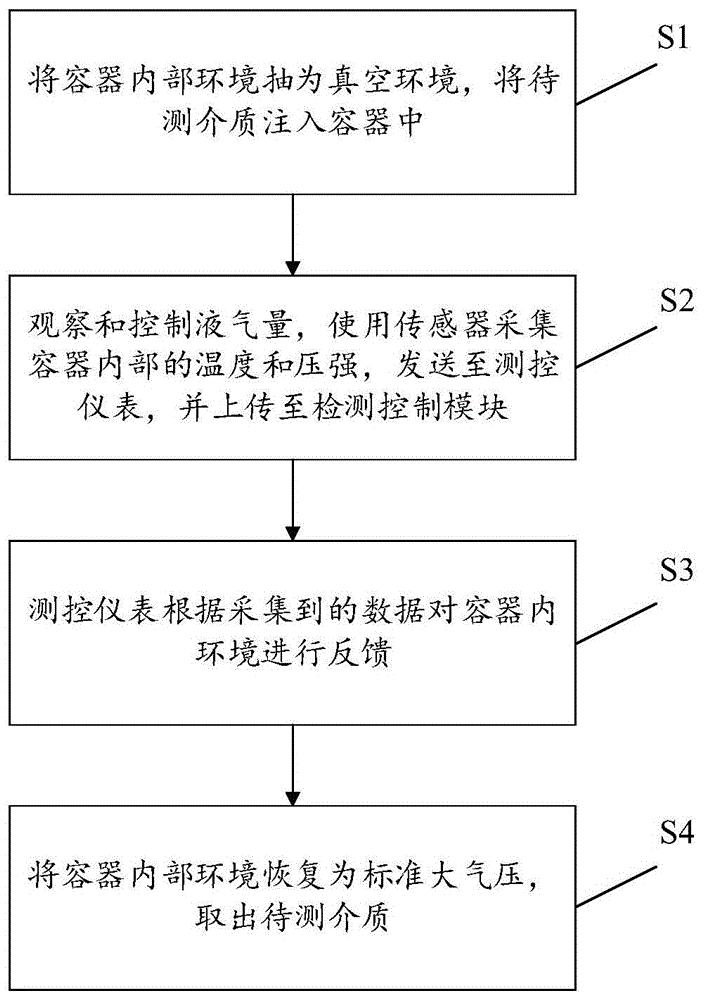
本发明公开了一种介质参数的测控方法,包括:将容器内部环境抽为真空环境,将待测介质注入容器中;观察和控制液气量,使用传感器采集容器内部的温度和压强,发送至测控仪表,并上传至检测控制模块;测控仪表根据采集到的数据对容器内环境进行反馈;将容器内部环境恢复为标准大气压,取出待测介质。本发明公开的介质参数的测控方法能有效解决现有技术无法实时且同时获取容器内上层蒸汽和底层液体的参数,无法对待测介质进行反馈控制的问题。




