欢迎来到创智领睿!

[发明]精品 G06T7/90
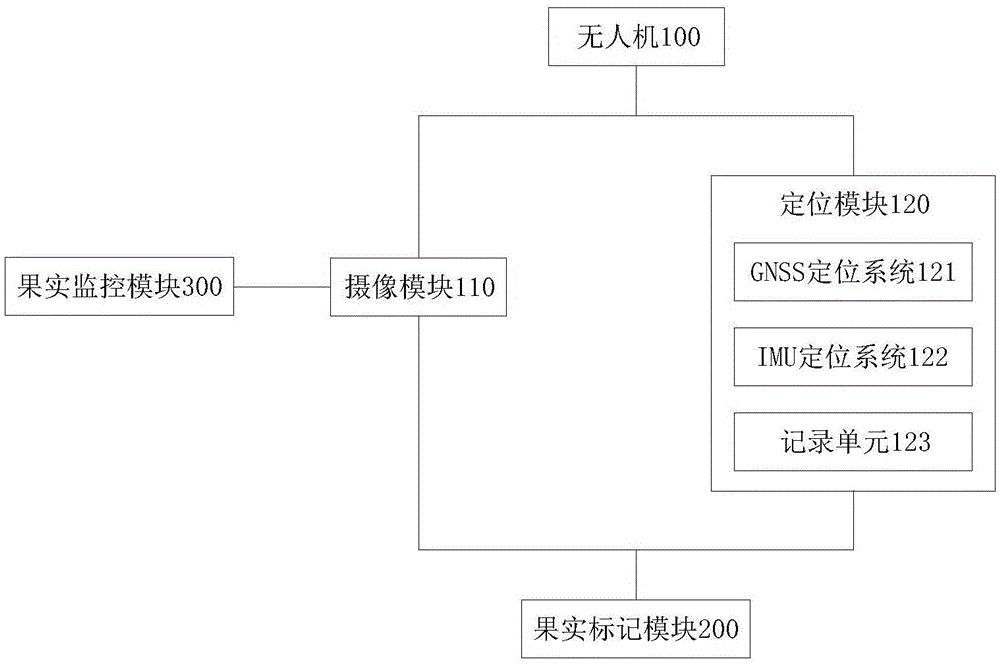
本发明涉及一种基于无人机定位拍摄的果园监控系统和方法,其中系统包括人机、果实标记模块、果实监控模块,无人机设有摄像模块、定位模块;摄像模块用于在无人机飞行时拍摄包含果园内参照物和果实的图像;定位模块用于获取在摄像模块拍摄图像时的无人机位置;果实标记模块用于从定位模块获取无人机位置,并确定摄像模块拍摄的图像上的果实位置,将无人机位置和图像上的果实位置作为果实的标记;果实监控模块用于根据图像上参照物与果实之间的颜色比值获取果实的颜色和/或根据图像上参照物与果实之间的大小比例获取果实的大小。本发明可以便捷地标记果园中的果实并监控果实的颜色大小,使得监控人员可以及时地对异常的果实或植株进行处理。
[发明]精品 G01N21/78
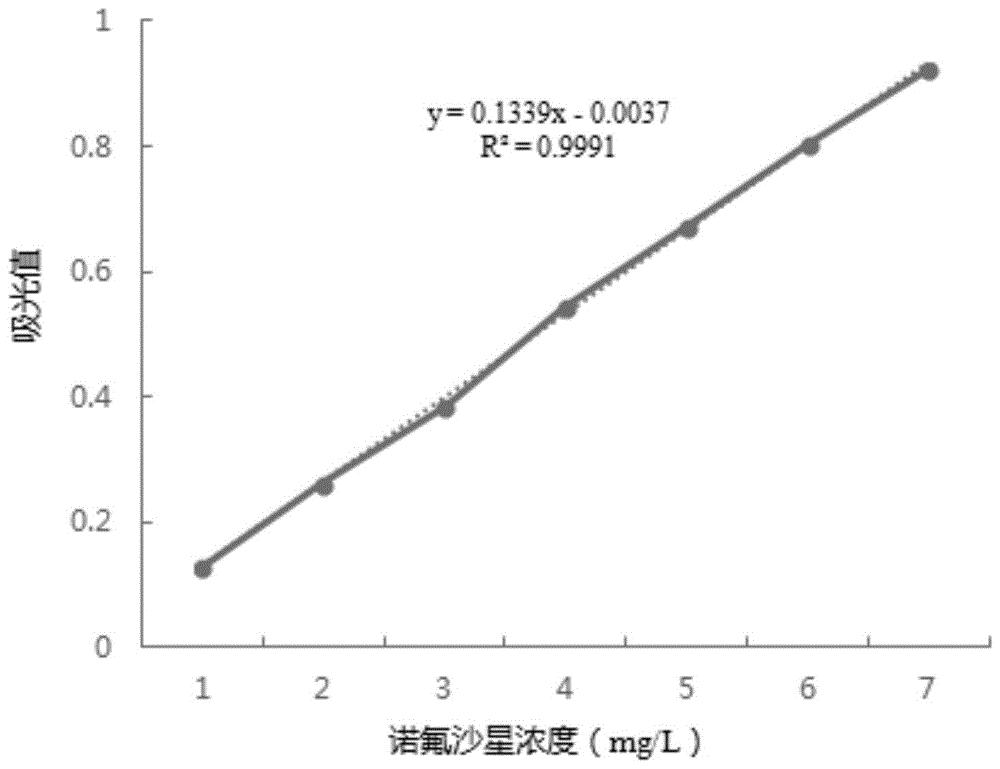
本发明涉及酸性电解水技术领域,具体涉及酸性电解水在制备去除食品内残留抗生素诺氟沙星的制剂中的应用。本发明首创地发现了酸性电解水具有降解抗生素诺氟沙星的新用途,通过三种方法来验证了不同比例的酸性电解水含量、不同pH值以及不同的浸泡时间对诺氟沙星溶液降解率的影响,结果证明酸性电解水除了已知的杀菌消毒作用,还具有降解诺氟沙星这一类抗生素的作用,可用于制备去除食品内残留抗生素的制剂。本发明对探索绿色高效地去除食品中的抗生素残留指出了新的发展方向,具有广阔的产业化应用前景。
[发明]精品 G08B17/06
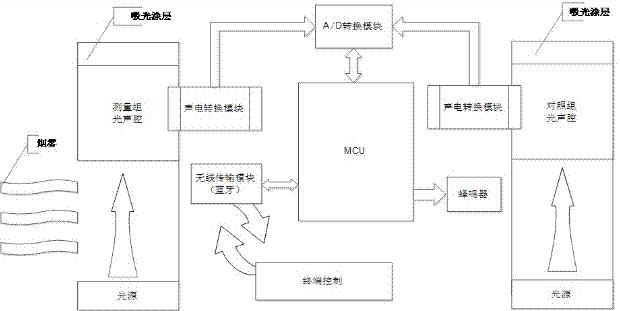
本发明公开了基于光声效应的农田火灾远程报警系统,该系统包括光声腔、声电转换模块、A/D转换模块、MCU、无线传输模块、远程监控端、报警模块,其中;多个光声腔分布于待防测农田的多个位置处,用于检测发火位置处的声音信号,并将声音信号发送给声电转换模块;声电转换模块与上述光声腔一一配套,将发来的声音信号转换成模拟电信号并发送给A/D转换模块;A/D转换模块接收MCU发来的控制指令对各个声电转换模块发来的模拟电信号进行转换得到数字电信号,并发送给MCU;MCU将得到的多组数字电信号进行分析处理,判断发火位置并将发火位置信息通过所述无线传输模块发送给远程监控端;远程监控端显示火灾位置信息并控制MCU使报警模块发出报警声。
[实用新型]精品 B08B3/12
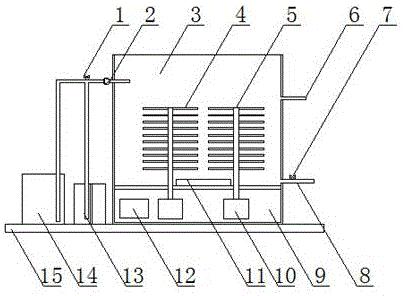
本实用新型公开了一种机器人零部件清洗装置,属于机器人技术领域,包括底座,所述底座设有仪器腔,且仪器腔顶端焊接有清洗槽,所述仪器腔内部顶端一侧设有超声波发生器,所述仪器腔内部顶端另一侧设有两个电机,且两个电机通过轴承连接有转动轴。本实用新型中通过仪器腔内部顶端一侧安装有超声波发生器,仪器腔内部顶端另一侧安装有两个电机,两个电机通过轴承连接有转动轴,转动轴从仪器腔内部延伸至清洗槽内部,转动轴外侧设有毛刷,清洗槽一侧开有通孔,通孔内设有输液管,先将清洗槽内部放满四分之三体积的液体,开启超声波发生器,机器人零件与油污和灰尘的作用力减弱,通过转动轴带动毛刷转动,清洗机器人零件。
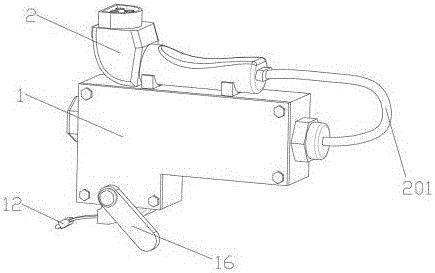
[实用新型]精品 B60L53/16
一种用于升降横移立体停车库的充电装置,包括主体框架、充电枪、固定块,其特征在于,所述主体框架与充电枪通过电枪导线电性连接,且主体框架与固定块滑动连接;所述主体框架内部设有推动气缸、上电接触块、上电接口、导线收纳装置、控制装置、滑轨槽;所述推动气缸与上电接触块螺丝连接;所述上电接触块与上电接口电性套接;所述导线收纳装置设于主体框架内部下方,且导线收纳装置位于推动气缸下方;所述滑轨槽设于主体框架背面;该装置能够自动断电,能够收纳整理线路,避免与停车库内其他的线路缠绕在一块,提高使用的效率,有效的减少安全隐患并且后期维护成本低。
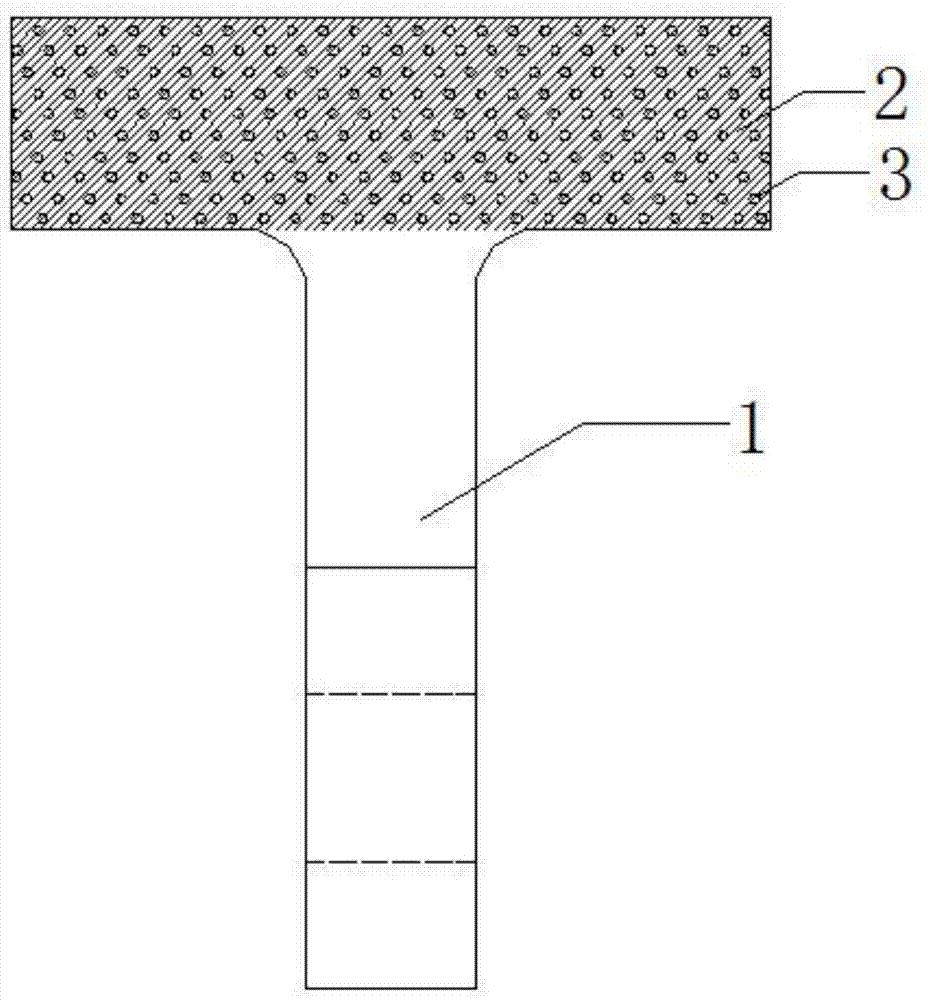
[发明]精品 B02C13/28
本发明提供了一种粉碎机锤片,该粉碎机锤片包括锤片基体,所述锤片基体的工作面上设有由钎料制成的钎焊层,所述钎焊层上钎焊有超硬磨粒。本发明粉碎机锤片硬度高、耐磨性好、使用寿命长、粉碎效果好、物料适应性好,可广泛应用于中药材料、食品、饲料、矿石、陶瓷材料等物料的粉碎,粉碎效率高,锤片损耗低,节省了物料粉碎加工的成本。同时,本发明还提供了一种粉碎机锤片的制备方法,通过钎焊工艺将超硬磨粒固着在粉碎机锤片基体的工作面上,超硬磨粒、钎焊层和锤片基体三者两两之间形成牢固的冶金结合层,对超硬磨粒的把持强度高,超硬磨粒不易脱落,同时,本发明粉碎机锤片的制备方法工艺简单、无污染、生产效率高。
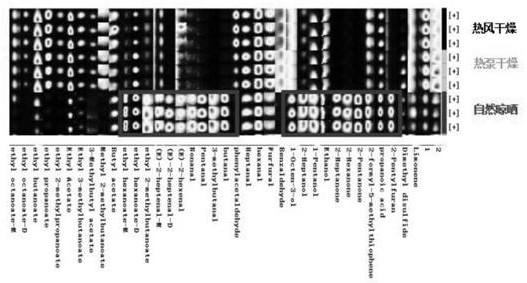
[发明]精品 G01N30/02
本发明涉及广式腊肠鉴别技术领域,具体公开了一种基于风味特征的广式腊肠品质快速鉴别方法。所述的基于风味特征的广式腊肠品质快速鉴别方法,包含如下步骤:标准特征图谱构建步骤:以广式腊肠风味物质成分为检测对象,采用气相‑离子迁移谱仪检测标准广式腊肠,构建基于风味特征的标准广式腊肠的标准特征图谱;待鉴别广式腊肠特征图谱构建步骤:将待鉴别的广式腊肠采用与标准特征图谱构建步骤中相同的气相‑离子迁移谱仪检测条件进行检测,得到基于风味特征的待鉴别广式腊肠的特征图谱;广式腊肠品质鉴别步骤:将待鉴别广式腊肠的特征图谱与标准特征图谱进行比较,判定待鉴别广式腊肠的品质。本发明所述的方法可以实现准确、快速的腊肠品质鉴别。
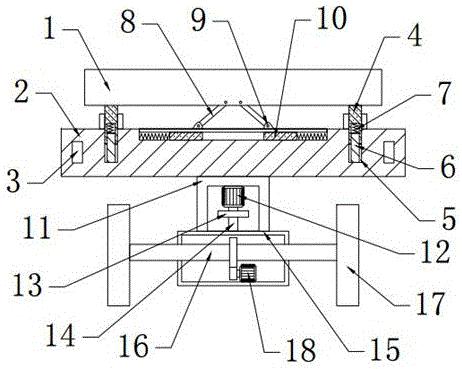
[实用新型]精品 B62D9/00
本实用新型涉及机器人技术领域,具体是一种机器人移动用行走底板,包括安装板,安装板下侧设置有连接板,连接板与安装板之间设置有减震机构,连接板下侧设置有旋转块,旋转块与连接板之间设置有转向机构,旋转块内侧轴承连接设置有固定杆,固定杆左右两侧固定连接设置有脚轮,本实用新型,通过设置红外传感器和第一电机,使装置可以绕开障碍物继续行走,提升了装置行走过程的流畅性,通过设置减震机构,可以减少颠簸路面对装置的影响,利于提高装置移动过程的平稳性,通过设置限位板,可以提升滑块滑动过程的稳定性,通过设置定位杆和定位槽,可以避免安装板的侧滑,提升了安装板的稳定性。
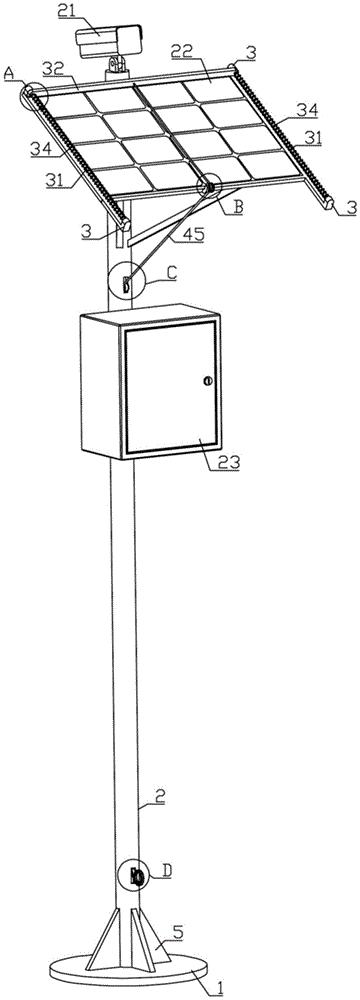
[实用新型]精品 G08B17/00
一种基于太阳能的森林防火报警装置,包括底板,底板设有空心支撑柱,空心支撑柱设有太阳能发电板,太阳能发电板设有安装座,安装座设有圆柱滑轨,圆柱滑轨设有滑板,滑板设有毛刷,圆柱滑轨设有弹簧,太阳能发电板向下倾斜一侧设有第一滑轮,空心支撑柱上侧和下侧分别设有上通槽和下通槽,上通槽和下通槽分别设有第二滑轮和第三滑轮,滑板向下倾斜一侧中部固定连接有拉绳,拉绳依次绕过第一滑轮、第二滑轮和第三滑轮,拉绳末端固定连接有拉环;本实用新型结构简单,工作人员站在地面就能对太阳能发电板表面进行清洁,工作人员就不用爬到高处,整个清洁工作就变的十分方便,避免了工作人员爬到高处掉落摔伤。
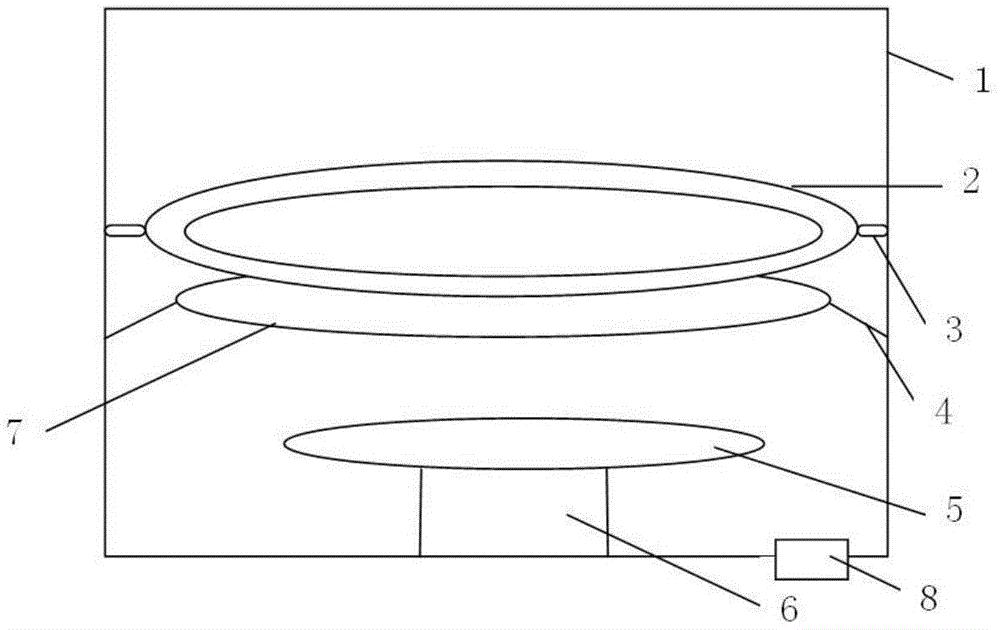
[实用新型]精品 B01L3/04
本实用新型公开了一种移动坩埚组件,其包括坩埚、供电导轨,上支架,下支架,移动导轨;上支架、下支架分别将供电导轨、移动导轨固定于真空腔室壁上;坩埚包括本体,耳部,驱动装置,底槽,以及设置于本体中的加热构件;其中本体具有容纳腔,用于容纳样品;在本体的两侧设置有对称的两耳部,在本体底部设置有底槽,底槽上方设置有驱动装置;两耳部放置于供电导轨上,为坩埚的加热构件供电;移动导轨,其承载坩埚的底槽,以利用驱动装置驱动坩埚进行移动;供电导轨为双导轨,移动导轨为单导轨;耳部为导电材料;实现坩埚根据实际需要进行移动,实现坩埚在真空腔室中移动速度、位置的准确控制。

[实用新型]精品 B60R11/04
本实用新型属于巡逻机器人技术领域,具体涉及一种农业园区使用的巡逻机器人,包括巡逻机器人本体,巡逻机器人本体设有螺纹杆,螺纹杆设有圆筒,圆筒设有转动件,转动件设有矩形滑杆,螺纹杆设有矩形滑槽,转动件设有摄像头,巡逻机器人本体设有支撑杆,支撑杆设有安装壳体,安装壳体设有条形槽,安装壳体设有壳盖,壳盖设有电池盒,电池盒设有电池和电路板,电池盒设有控制开关,壳盖下端固定连接有与电路板电性连接的紫外线灯管,紫外线灯管外侧设有与壳盖固定连接的电网,电网与紫外线灯管并联;该巡逻机器人方便对摄像头的高度进行调节,实用性较高,另外该巡逻机器人还具备捕杀蚊虫功能,能够对农业园区内的蚊虫进行捕杀。
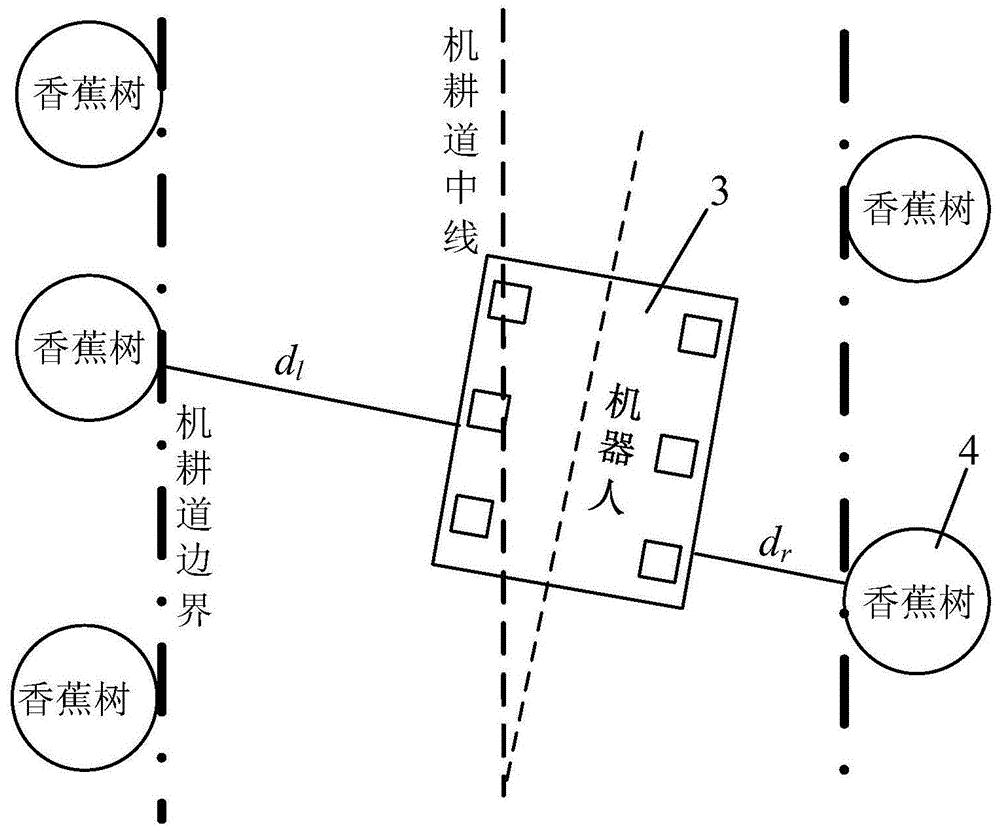
[发明]精品 G01S17/08
本发明公开了基于拟合滤波的激光和超声波香蕉树测距方法,通过激光和超声波传感器组合对香蕉树进行测距,并由二者的测距数据相互校验滤除单个传感器由于光线等因素导致误差较大的测距值,采用最小二乘法以二次多项式能够较好地拟合一个周期内各采样时刻所测香蕉树的距离数据,基于拟合二次多项式和设定阈值有效滤除小灌木等干扰物和道路颠簸产生的偏差较大的距离数据,再求取滤波后距离数组中三个最小值的平均值,即为机器人与香蕉树的最短距离。本发明测距方法的误差率为1.0%‑2.0%,相应的最大测距误差为1.0cm,其测距稳定性好,能为机器人在自然香蕉园环境中实现局部定位和导航提供准确、可靠的距离数据。




